택배기사의 신체적·정신적 부담 완화를 위한 인간-AI 기반 휴머노이드 로봇 간 협업 모델 제안
초록
연구배경 본 연구는 택배 서비스의 라스트 마일(last-mile) 배송 구간에서 택배기사와 AI 기반 휴머노이드 로봇 간의 협업 모델을 제안한다. 인간-AI 협업을 효과적으로 구현하기 위해 AI 기반 휴머노이드 로봇이 수행할 수 있는 적절한 역할과 전략을 탐색하는 것을 주요 목적으로 한다. 기존 연구들이 주로 물류센터 내 자동화에 집중된 반면, 본 연구는 실제 배송 현장에서 발생하는 택배기사의 신체적·심리적 부담을 완화하고, 업무 효율성을 향상시키기 위한 새로운 협업 모델을 제시한다.
연구방법 인간 중심 디자인(HCD, human-centered design) 방법론에 기반한 서비스 디자인 프로세스를 적용하였다. 먼저 인간-AI 협업의 개념과 주요 고려사항에 대한 이론적 고찰을 수행하고, 디지털 에스노그래피 및 심층 인터뷰를 통해 택배기사들이 경험하는 주요 페인포인트를 도출하였다. 이를 바탕으로 협업 수준별 다양한 서비스 시나리오를 개발하고, 정량적 및 정성적 평가를 통해 그 타당성을 검증하였다.
연구결과 AI 기반 휴머노이드 로봇의 도입은 반복적인 중량물 적재로 인한 신체적 피로와 파손 상품에 대한 클레임 처리 부담 등 주요 문제를 완화하는 데 효과적일 수 있음이 확인되었다. 또한 고객 응대 업무의 자동화는 작업자의 정신적 부담을 줄이는 데 기여할 수 있음을 보여주었다. 정량적 평가에서는 ‘신뢰성_오류 회복성’이 90%로 높은 긍정 평가를 받은 반면, ‘터치포인트_연결성’(76%)과 ‘로봇윤리_책임성’(70%)은 개선이 필요한 항목으로 나타났다. 정성적 평가에서도 시스템의 신뢰성과 멀티모달 상호작용 능력에 대한 긍정적 피드백이 있었으며, 동시에 로봇윤리의 책임성, 오류 제어의 통제 가능성, 앱 개인화 적절성에 대한 개선 요구도 도출되었다.
결론 본 연구는 AI 기반 휴머노이드 로봇이 인간-AI 협업에서 보조자이자 동료로 기능할 수 있으며, 이는 업무 효율성과 배송 환경 개선에 실질적으로 기여할 수 있음을 확인하였다. 또한 다양한 멀티모달 상호작용이 협업 수준을 구체화하고, 인간-로봇 간 상호작용의 질을 향상시키는 데 핵심적인 역할을 한다는 점도 입증되었다. 마지막으로, AI 시스템에 대한 신뢰 구축을 위해서는 로봇윤리의 책임성, 오류 제어의 통제 가능성, 그리고 보안 기능의 확보가 필수적임을 강조한다. 본 연구 결과는 택배 산업뿐 아니라 물류를 포함한 다양한 서비스 산업 전반에 걸쳐 인간-AI 협업 모델의 실질적 확산 가능성을 시사한다.
Abstract
Background This study proposes a collaborative model between delivery workers and artificial intelligence (AI)-based humanoid robots in the last-mile delivery segment of courier services. The primary objective is to explore appropriate roles and strategies that AI-powered humanoid robots can undertake to enable effective human-AI collaboration. While previous research has primarily focused on automation within logistics centers, this study presents a new collaboration model aimed at alleviating the physical and psychological burdens experienced by delivery workers in real-world delivery settings and improving operational efficiency.
Methods A service design process grounded in the human-centered design (HCD) methodology was applied. The study began with a theoretical review of the concept of human-AI collaboration and its key considerations. Digital ethnography and in-depth interviews were conducted to identify major pain points experienced by delivery workers. Based on these insights, various service scenarios were developed according to different levels of collaboration with AI-based humanoid robots, and their validity was verified through both quantitative and qualitative evaluations.
Results The findings confirmed that the integration of AI-based humanoid robots could be effective in mitigating critical challenges, such as physical fatigue caused by repetitive loading of heavy parcels and the burden of managing claims related to damaged goods. Furthermore, automating customer service tasks contributed to reducing the psychological stress of delivery workers. In the quantitative evaluation, trust–error recoverabilityreceived a high positive score (90%), while touchpoint connectivity(76%) and robot ethics–accountability(70%) were identified as areas needing improvement. The qualitative assessment also revealed positive feedback regarding the system’s reliability and multimodal interaction capabilities, along with suggestions for improvement in robot ethics accountability, controllability of error management, and appropriateness of app personalization.
Conclusions This study demonstrates that AI-based humanoid robots can function as both assistants and peers in human-AI collaboration, contributing significantly to improving work efficiency and delivery environments. Moreover, diverse forms of multimodal interaction play a critical role in defining levels of collaboration and enhancing the quality of human-robot interaction. Finally, the study highlights that ensuring ethical accountability, controllability of error management, and robust security functionsare essential for building trust in AI systems. These findings suggest the potential for the practical expansion of human-AI collaboration models not only in the courier industry but also across the broader logistics and service sectors.
Keywords:
Delivery Workers, Last-mile Delivery, Human-AI Humanoid Robot Collaboration, AI-based Services, Service Design키워드:
택배기사, 라스트 마일 구간, 인간-AI 기반 휴머노이드 로봇 협업, AI 기반 서비스, 서비스 디자인1. 서론
1. 1. 연구의 배경 및 목적
2023년 기준, 우리나라의 연간 택배 물동량은 51억 5천만 건에 달한다. 이는 국민 1인당 연평균 100건 이상 택배를 이용한 것으로 환산된다(KILA, 2023). 전자상거래와 온라인 쇼핑의 성장으로 물류 산업은 지속적으로 확대될 것으로 전망되나, 라스트마일(last-mile) 배송의 비효율성과 높은 운영 비용이 주요 과제로 부상하고 있다(Eyad et al., 2024).
특히 택배기사들은 주 6일, 하루 평균 12시간 이상 근무하는 과중한 노동에 시달리고 있으며, 산업재해보상 보험 등 법적 보호의 사각지대에 놓여 있다(Seoul Institute Policy Report, 2021). 중량물 취급으로 인한 근골격계 질환과 고객 클레임 대응에서 발생하는 정신적 스트레스는 업무 만족도와 생산성을 저해하며, 이는 물류 산업의 지속가능성에도 부정적인 영향을 미친다. 따라서 근로 환경 개선을 위한 실질적이고 구조적인 대안 마련과 이를 뒷받침하는 연구가 요구된다.
서비스 디자인은 인간과 AI 기술 간 상호작용을 최적화하여 업무 효율성과 사용자 경험을 개선하는 데 중점을 둔다. 특히 인간-AI 협업은 AI 기반 서비스(AI-based services)를 통해 인간과 AI의 역할을 적절히 분담함으로써 효율성을 극대화하고, 근로자의 부담을 경감하는 데 기여한다(Mazzei et al., 2021). 휴머노이드 로봇은 중량물 운반, 상품 분류 등 반복적이고 물리적인 작업을 수행함으로써 택배기사의 신체적 부담을 줄일 수 있으며(Collins et al., 2022), 인간은 복잡한 의사결정과 창의적 판단을 통해 협업의 시너지를 높이는 역할을 수행할 수 있다(Bradshaw et al., 2022).
이에 본 연구는 인간과 AI 기반 휴머노이드 로봇 간 협업을 통해 택배기사의 신체적·정신적 부담을 완화하고, 업무 효율성을 향상시킬 수 있는 모델을 제안하고자 한다. 이를 위해 서비스 블루프린트(service blueprint) 프레임워크를 설계하고, 협업 수준과 역할 분담을 구조화하여 AI 기반 로봇 기술의 실질적 가능성을 탐구하였다.
궁극적으로 이 연구는 인간-AI 협업 기반의 새로운 패러다임을 제시함으로써 택배 산업의 지속가능성을 제고하고, 물류 서비스 혁신을 위한 실질적인 기초 자료로 기여하고자 한다.
1. 2. 연구범위와 방법
본 연구는 라스트 마일 구간에서 신체적·정신적 부담을 겪는 주간 및 야간 택배 근로자를 주요 대상으로 설정하였다. 이들의 실제 업무 과정에서 나타난 잠재적 니즈와 페인포인트를 기반으로 문제를 정의하고, AI 기반 서비스의 기회 요인을 분석하여 개선 방안을 도출하였다.
연구는 택배기사의 관점에서 서비스 시나리오를 설계하고, 이를 바탕으로 프로토타입을 제작한 뒤, 사용자 검증과 심층 인터뷰를 통해 문제 해결 방향을 구체화하였다. 검증 단계에서는 작업 및 협업 과정을 시각화한 콘셉트 비디오를 제작하고, 배송 중 개인 맞춤 설정과 고객 클레임 대응 기능이 포함된 앱 서비스를 개발하였다.
사용자 검증 결과를 토대로 프로토타입과 협업 모델을 보완하고, 최종적으로 인간-AI 기반 휴머노이드 로봇 협업의 수준(level)을 정의하여 서비스 블루프린트 프레임워크를 설계하였다. 본 연구는 인간 중심 디자인 방법론인 서비스 디자인 프로세스를 기반으로 수행되었으며, 이를 통해 택배기사의 업무 효율을 향상시키고 신체적·정신적 부담을 완화하는 실질적인 방안을 제안하고자 한다.
각 단계의 연구 범위는 다음 [Table 1]과 같다.

Research Methods and Content
2. 이론적 고찰
이 장에서는 인간-AI 협업의 개념과 이해, 인간과 AI의 역할(Kore, 2022), AI 자율성 수준(Min et al., 2020) 등 AI 기반 협업에서 고려해야 할 핵심 요소들을 논의한다. 또한 STEEP-V 분석을 통해 택배 산업의 현황과 라스트 마일 물류 서비스에서 AI 기반 협업이 가지는 의미를 심층적으로 분석한다.
2. 1. Human-in-the-loop(HITL)와 인간-AI 협업의 이해
1) 인간-AI 협업의 개념과 이해
인간-AI 협업(Human-in-the-loop, HITL)은 AI 기반 자동화 시스템 내에서 인간이 개입하여 결과에 영향을 미치는 협력 모델로 정의된다(Schneiderman, 2020). 이 모델은 AI의 데이터 처리 능력과 인간의 직관 및 창의성을 결합하여, 의사결정의 효율성과 정확성을 향상시키는 것을 목적으로 한다(Davenport & Kirby, 2016; Duan et al., 2019).
HITL은 단순한 자동화와 구별되는 증강지능(Augmented Intelligence) 개념에 기반하며, AI는 분석 및 의사결정 지원을, 인간은 판단 검토와 조정 역할을 수행한다. 이 협업 구조는 AI 자율성 수준을 고려한 최적의 역할 분담 설계에 유용하게 활용될 수 있다(Schneiderman, 2020; Colson, 2019).
AI는 초기에는 도구(tool)로 시작하여 보조자(assistant), 동료(peer), 그리고 관리자(manager)로 점진적으로 발전할 수 있으며, 각 단계에서 인간과의 협업 방식도 변화한다. 민옥기 외(2020)와 Kore(2022)의 연구에 따르면, AI는 자율성과 기능을 확장해 가며 물류 및 서비스 시스템에서 협업 주체로 작동하며, HITL 개념을 통해 협업이 보다 효과적으로 구현될 수 있다.
결론적으로, HITL은 인간과 AI의 상호보완적 강점을 균형 있게 활용할 수 있는 이상적인 협업 모델로, AI는 의사결정을 지원하고 인간은 그 결과를 감독하고 개입할 수 있는 구조를 유지한다. 이러한 역할의 변화는 AI 자율성 수준에 따라 점진적으로 이루어지며, 그 발전 단계는 [Table 2]에 정리하였다.
Levels of AI Autonomy (Min et al., 2020; Kore, 2022)
AI의 역할은 단순한 도구(tool)에서 시작해 보조자(assistant), 동료(peer), 자율 시스템으로 점진적으로 발전한다. 이 중 동료(peer) 단계는 인간과의 협업 수준을 질적으로 향상시키고, 전반적인 생산성을 증대시키는 전환점으로 간주된다.
도구(tool) 단계에서는 인간이 AI를 직접 조작하며 명령을 내리는 방식으로 상호작용이 이루어진다. 보조자(assistant) 단계에서는 AI가 일부 환경을 감지하고 이에 반응할 수 있는 수준으로 발전한다. 동료(peer) 단계에 이르면, AI는 인간과 대등한 협업을 수행하며 보다 능동적이고 독립적인 역할을 수행할 수 있다.
[Figure 1]은 AI 기술 수준의 점진적 고도화에 따라, 인간과의 상호작용이 어떻게 강화되는지를 시각적으로 보여준다.

Roles for AI (Kore, 2022)
2) 인간-AI 협업 수준(HITL) 설계를 위한 핵심요인
효과적인 인간-AI 협업(HITL)을 구현하기 위해서는 협업 수준, 신뢰, 윤리 기반 설계, 상호작용의 네 가지 핵심 요소를 반드시 고려해야 한다.
첫째, 협업 수준은 AI의 자동화 효율성을 유지하면서도, 인간이 필요 시 의사결정에 개입할 수 있는 구조로 설계되어야 한다(Shneiderman, 2020; Min et al., 2020). 이는 AI가 단순한 도구를 넘어, 복잡한 문제 해결의 동반자로 기능하도록 하는 것이다(Davenport & Kirby, 2016).
둘째, 신뢰는 협업의 전제 조건으로, AI 시스템은 설명 가능성(eXplainable AI)을 바탕으로 투명하고 책임감 있게 설계되어야 하며, 오류 예방 및 복구 기능을 갖추는 것이 중요하다(Yang, 2023; Shneiderman, 2020).
셋째, 윤리 기반 AI 설계는 공정성과 책임성 확보를 목표로 하며, 데이터 편향 제거와 지속적 개선을 통해 윤리적 기준을 충족해야 한다. 특히 인간이 자동화된 결정에 대해 검토·수정할 수 있는 통제권을 유지하는 것이 핵심이다(Min et al., 2020; Kore, 2022).
넷째, 상호작용은 협업의 실행력을 보장하는 요소로, 인간과 AI 간 인터페이스는 직관적이고 원활하게 설계되어 사용자 혼란을 최소화하고 경험을 향상시켜야 한다.
이 네 가지 요소는 HITL 시스템의 신뢰성과 효율성을 높이며, 인간-AI 간 상호보완적 협업 구조를 설계하는 데 있어 필수적인 고려 사항이다. 이에 따라, 인간-AI 협업 수준에 적합한 설계 요소를 다음 [Table 3]에 정리하였다.
Essential Factors to Consider for Designing Human-AI Collaboration Levels (HITL)
2. 2. STEEP-V 분석을 통한 택배 산업 현황과 택배 근로자의 이해
STEEP-V 분석은 택배 산업의 흐름과 근로자 현황을 이해하고, AI 기반 서비스의 방향성을 설정하는 데 중요한 역할을 한다.
먼저, 사회적 측면(Social)에서는 택배 물동량 증가로 인해 택배기사들의 업무 부담이 가중되고, 건강 및 안전 문제가 주요 이슈로 부각되었다(National Logistics Center, 2024). 이에 따라 근로 환경 개선의 필요성이 대두되고 있다(Ha et al., 2023). 기술적 측면(Technological)에서는 AI와 로봇 기술을 활용한 물류 자동화, 실시간 배송 모니터링, 빅데이터와 예측 분석 기술이 물류 효율성과 고객 맞춤형 서비스를 가능하게 하고 있다(Gonzalez et al., 2020).
경제적 측면(Economic)에서는 전자상거래 확대에 따라 택배 시장의 경쟁이 심화되고 있으며, 도시 교통 문제와 온실가스 배출 증가로 인해 친환경 물류 시스템의 도입이 절실히 요구된다(Rakyta et al., 2022). 또한, 환경적 측면(Environmental)에서는 물류 배송 증가로 인한 대기 오염과 온실가스 배출 문제가 심각해지고 있으며, 정부의 친환경 물류 정책 마련이 요구된다.
정치/법규적 측면(Political/Legal)에서는 택배 근로자의 근로시간 보호, 개인정보 보호법 준수 등과 같은 법적 규제 강화가 필요하며, AI 및 로봇 기술 도입에 따른 책임 소재를 명확히 하는 정책적 접근이 요구된다(Kim, 2019). 이러한 STEEP-V 분석을 바탕으로, 택배 산업의 지속가능성을 확보하기 위해 근로 환경 개선, 친환경 물류 시스템 도입, 법적 규제 강화, 로봇의 책임소재 명확화 등이 중요한 사회적 가치로 도출되었다. 이에 대한 세부 내용은 [Table 4]에 정리하였다.
STEEP-V Framework Analysis
3. 인간- AI 기반 휴머노이드 로봇 협업 필요성
이 장에서는 인간-AI 협업 개발을 위한 근미래적 관점에서, 인간-AI 기반 휴머노이드 로봇의 도입과 그 필요성에 대해 논의하고자 한다.
3. 1. 자율주행 배송 로봇의 한계와 휴머노이드 로봇의 필요성
현재 물류 시스템에서는 자율주행 배송 로봇이 음식 배달, 소형 물품 운송, 창고 물류 등의 작업에 활용되고 있다. 이러한 로봇은 반복적인 작업을 효율적으로 수행하며, 물류 서비스의 생산성과 비용 절감에 기여하고 있다. 특히 정해진 경로를 따라 운행하거나, 사전에 설정된 환경 내에서 안정적으로 작동하는 데 최적화되어 있다.실제 서비스되고 있는 대표적인 자율주행 배송 로봇의 예시는 [Table 5]와 같다.
Examples of Autonomous Delivery Robots
이러한 한계를 해결하기 위해, AI 기반 휴머노이드 로봇은 라스트 마일 배송 서비스에서 인간-AI 협업의 새로운 대안으로 주목받고 있다. 휴머노이드 로봇은 인간과 유사한 구조와 상호작용 능력을 갖추고 있어 고객 요청에 유연하게 대응할 수 있으며(Boysen et al., 2021), 복잡한 지형에서도 안정적으로 작업을 수행할 수 있다(Chen et al., 2021). 또한, 무거운 물품 운반과 정밀한 작업 수행이 가능하여 택배기사의 신체적 부담을 줄이고, 물류 작업의 효율성을 높이는 데 기여할 수 있다(Hoffmann & Prause, 2018).
3. 2. 인간-AI 기반 휴머노이드 로봇 협업의 역할
인간-AI 기반 휴머노이드 로봇 협업은 물류 산업의 지속 가능한 발전을 위한 핵심 전략으로, 효율성과 생산성을 극대화하는 데 중요한 역할을 한다. AI 기반 휴머노이드 로봇은 반복적이고 신체적으로 부담이 큰 작업을 수행하고, 인간은 창의성과 판단력을 요구하는 업무에 집중함으로써 전반적인 작업 품질을 향상시킨다. 이러한 협업 구조는 작업자의 부담을 줄이고 고객 서비스 품질을 높이며, 물류 산업의 경쟁력을 강화하는 데 기여한다.
휴머노이드 로봇과 인간의 협업은 다음과 같은 장점을 가진다. 첫째, 로봇은 물품 분류, 포장, 운반 등 반복적이고 물리적인 작업을 자동화하여 작업 속도와 품질을 향상시킨다. 둘째, 반복 작업의 자동화는 작업자의 신체적 부담을 줄이는 동시에 작업의 정확성을 높인다. 셋째, 인간은 고객 상담과 문제 해결 같은 창의적이고 복잡한 작업에 집중하여, 유연한 대응을 통해 고객 만족도를 향상시킬 수 있다. 넷째, 로봇은 실시간으로 데이터를 수집·분석하여 작업의 효율성을 극대화하고, 인간은 이를 기반으로 전략적 의사결정을 수행한다. 다섯째, AI 기반의 분석 및 의사소통 기능이 통합된 로봇은 고객의 요구를 이해하고 적절히 대응할 수 있는 시스템 구축에 기여한다.
이에 따라 인간과 AI 기반 휴머노이드 로봇의 협업은 작업의 성격과 요구에 따라 명확하게 역할을 분배하고, 상호 보완적인 관계를 형성하도록 설계되었으며, 물류 산업의 혁신과 경쟁력 강화에 중대한 기여를 한다[Table 6].
Collaborative Roles of Robots and Humans
3. 3. 인간- AI 협업에 따른 멀티모달리티 (Multimodality)와 터치포인트
인간과 AI 시스템의 협업에서 멀티모달리티와 터치포인트는 상호작용을 향상시키는 핵심 요소이다. 멀티모달리티는 음성, 텍스트, 제스처 등 다양한 상호작용 방식을 활용하여 인간-AI 협업 수준을 높이는 접근법이다. AI 기반 휴머노이드 로봇은 음성 명령, 터치 인터페이스, 제스처 인식을 통해 직관적이고 효율적인 상호작용을 지원하며, 사용자와의 소통을 보다 원활하게 한다.
멀티모달리티는 단일 모달, 다중 모달, 고급 다중 모달로 구분된다. 단일 모달은 시각, 청각, 촉각 중 하나의 데이터만 처리하고, 다중 모달은 두 가지 이상의 데이터를 병렬적으로 처리한다. 고급 다중 모달은 다양한 데이터를 통합적으로 분석하여 상황의 맥락을 해석하고 의미를 추론하는 방식이다. 예를 들어, 물류센터에서는 AI 로봇이 음성 명령과 시각 데이터를 결합하여 작업의 정확성과 효율성을 높일 수 있다. 이러한 멀티모달리티는 인간과 AI 간 신뢰를 강화하고, 상호작용의 효율성을 극대화하는 데 기여한다.
터치포인트는 로봇과 인간, 또는 환경 간의 상호작용 지점을 의미하며, 단일 터치포인트, 다중 터치포인트, 직관적 터치포인트로 분류된다. 단일 터치포인트는 하나의 접촉 지점만을 활용하고, 다중 터치포인트는 여러 접촉 지점을 병렬적으로 활용하여 작업 효율성을 높인다. 직관적 터치포인트는 다양한 접촉 지점을 통합하여 자연스럽고 직관적인 상호작용을 제공한다.
이렇듯, 멀티모달리티와 터치포인트는 인간-AI 협업 과정에서 직관적이고 효율적인 상호작용을 가능하게 하며, 신뢰성과 사용자 경험을 강화하는 데 핵심적인 역할을 한다.
4. 사용자 조사와 문제 정의
이 장에서는 택배기사의 업무 환경과 일과를 분석하고, 디지털 에스노그래피와 파일럿 심층 인터뷰를 통해 이들의 잠재적 니즈와 페인포인트를 파악한 뒤, 이를 기반으로 문제를 정의하고자 한다.
4. 1. 사용자 조사 계획
택배기사의 신체적·정신적 부담을 줄이고 생산성을 향상시키기 위한 인간-AI 기반 휴머노이드 로봇 협업 서비스 설계를 목적으로, 택배기사의 니즈와 페인포인트를 도출하였다. 다양한 경력과 연령대의 택배기사들을 대상으로 업무 환경, 고객과의 상호작용, 디지털 도구 활용 상황을 분석하여 실질적인 문제점을 파악하고자 하였다.
택배기사의 업무 특성상 긴 이동 거리와 반복적인 작업으로 인해 현장 관찰이 업무 흐름에 영향을 미칠 가능성이 있었다. 이러한 제한을 극복하기 위해, 디지털 에스노그래피를 활용하여 온라인 커뮤니티, 유튜브, 블로그 등에서 택배기사들의 경험과 의견을 분석하였으며, 심층 인터뷰를 통해 이들이 겪는 신체적·정신적 어려움과 고객 응대 과정의 문제를 심층적으로 조사하였다.
수집된 데이터는 친화도 맵(Affinity Diagram)을 사용해 유사성을 기반으로 체계적으로 분류하였으며, 이를 통해 주요 문제와 패턴을 도출하였다. 또한 분석 결과를 바탕으로 대표 사용자 유형(페르소나)을 정의하고, 배송 과정에서 발생하는 단계별 접점과 문제를 시각화한 고객 여정 지도를 개발하였다. 이러한 과정은 택배기사의 업무와 경험에서 핵심적인 페인포인트를 명확히 밝히고, 사용자 중심의 AI 기반 로봇 협업 서비스 설계를 위한 기초 자료를 제공하는 데 기여하였다 [Table 7].
Establishing a User Research Plan
4. 2. 사용자 조사 데이터 분석
(1) 디지털 에스노그래피를 통한 택배기사의 업무 여정 분석
택배기사의 업무 환경과 문제점을 분석하고 개선 방안을 도출하기 위해, 디지털 에스노그래피 방법론을 활용하였다.
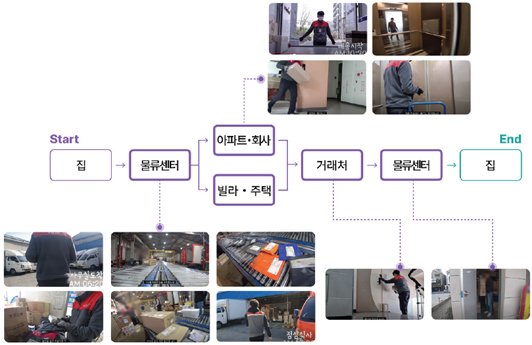
이를 위해 택배기사의 다양한 작업 환경과 실제 업무 과정을 담은 영상 자료를 선정하였으며, 해당 영상들은 물류센터, 배송지, 거래처 등에서의 작업 여정을 포함하고 있어 문제 상황과 상호작용 지점을 분석하는 데 적합한 자료로 판단되었다[Table 8].
Video of Delivery Worker
다음 [Table 9]는 디지털 에스노그래피 방법론을 활용하여 택배기사의 업무 환경을 분석하고, A.E.I.O.U 프레임워크를 통해 주요 행동, 상호작용, 작업 환경, 이해관계자를 구조화하였으며, 택배기사의 주요 업무 단계별 문제 상황과 터치포인트를 도출하였다.
Digital Ethnography Analysis
관찰 결과, 배송 상품 분류와 차량 적재 과정에서 택배기사의 반복적인 수작업과 작업 지연이 높은 피로도를 유발하였다. 또한 거래처 물건 상차 시, 시간 조율 문제로 인해 재방문이 필요한 상황이 발생하며, 이는 업무 부담을 더욱 가중시키는 요인으로 작용하고 있다. 이와 더불어, 고객 클레임 처리 과정에서의 심리적 스트레스 역시 택배기사들이 직면한 중요한 과제로 나타남을 알 수 있었다.
(2) 파일럿 단계 심층 인터뷰(In-depth interview)
택배기사의 업무 환경은 사용자 특성과 개인별 상황에 따라 상이하게 나타난다. 이를 반영하여, 내적 요인과 외적 요인을 주요 기준으로 설정하고 택배기사들이 직면한 문제점과 니즈를 파악하기 위해 심층 인터뷰를 진행하였다. 이 과정은 택배기사의 업무 환경에 대한 깊이 있는 이해를 도출하는 데 중점을 두었다. 2024년 4월 13일부터 4월 16일까지 현직 택배기사 10명을 대상으로 파일럿 단계 심층 인터뷰를 실시하였다[Table 10].
In-Depth Interview Information
심층 인터뷰 분석 결과, 친화도 맵(Affinity Diagram) 기법을 통해 택배기사의 주요 페인포인트와 니즈를 도출하였다.
첫째, 물품 분류 및 적재 과정에서 주소지나 아파트 동별로 바코드 스캐너를 활용해 개별적으로 물건을 분류해야 하는 절차는 시간 압박으로 이어졌다. 둘째, 반복적인 상·하차 작업과 장시간의 물품 적재는 신체적 피로를 크게 증가시켰다. 셋째, 오배송 및 파손으로 인한 고객 클레임은 정신적 스트레스를 유발했으며, 고객과의 대화에서 발생하는 심리적 부담도 주요 과제로 확인되었다. 넷째, 교통체증이나 날씨와 같은 외부 변수는 배송 지연에 대한 지속적인 우려를 야기하며, 택배기사에게 큰 부담으로 작용하고 있었다. 아울러, 각 페인포인트와 관련된 물리적 요소(작업 도구 및 환경), 상호작용적 요소(기술 및 시스템), 인적 접점(고객 및 동료)을 체계적으로 분석하였다[Table 11].
In-Depth Interview Analysis
4. 3. 서비스 설계를 위한 페르소나 설정
(1) 사용자 유형에 따른 Persona 설정사용자의 동기와 행동에 영향을 미치는 주요 변수를 분석한 결과, 두 가지 대표 사용자 유형(페르소나)을 도출하였다. 각 페르소나는 사용자의 니즈와 페인포인트를 이해하고, 서비스 설계 과정에서 이를 반영한 기회 요소를 발견하기 위한 목적으로 설정되었다[Table 12]
Persona A and Persona B Analysis
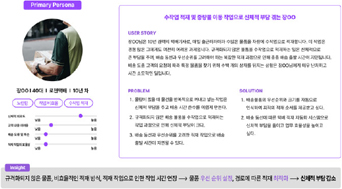
① 페르소나 A: 신체적 부담을 겪는 Primary Persona
페르소나 A는 수작업 적재와 중량물 이동으로 인한 신체적 피로를 주요 과제로 인식하고 있다. 반복적이고 복잡한 적재 과정에서 발생하는 신체적 부담을 줄이기 위해, 자동화된 적재 시스템과 AI 기반 휴머노이드 로봇 협업의 필요성이 확인되었다. 특히 중량물 운반과 협소한 작업 공간의 어려움을 해결하기 위한 특화된 로봇 서비스가 요구되었다.
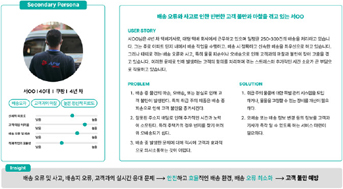
② 페르소나 B: 정신적 부담을 겪는 Secondary Persona
페르소나 B는 배송 오류나 사고로 인한 고객 불만 및 빈번한 마찰을 주요 과제로 경험하고 있다. 고객 클레임으로 발생하는 정신적 스트레스를 완화하기 위해, AI 기반 고객 응대 시스템과 자동화된 고객 지원 솔루션의 도입 필요성이 도출되었다. 이러한 솔루션은 고객 응대 단계에서 발생하는 심리적 부담을 줄이는 데 중요한 역할을 할 것으로 평가되었다.
페르소나 A는 AI 휴머노이드 로봇과의 협업을 통해 신체적 부담을 줄일 수 있는 서비스 기회 요소가 확인되었으며, 페르소나 B는 AI 기반 고객 응대 솔루션을 통해 정신적 부담을 완화할 수 있는 서비스 전략 방향이 도출되었다.
(2) 페르소나(Persona)유형 별 고객경험 여정 지도 분석
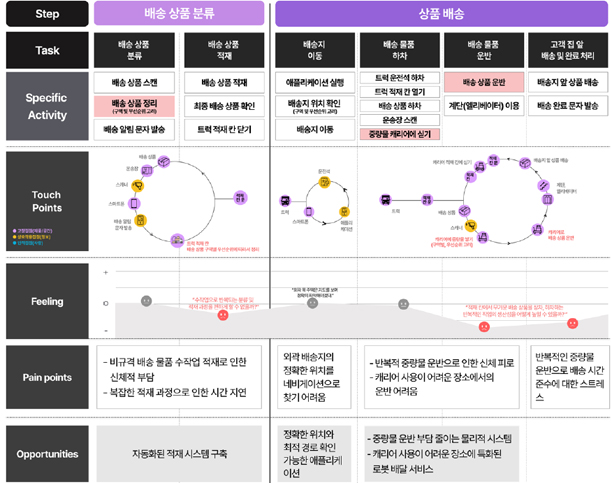
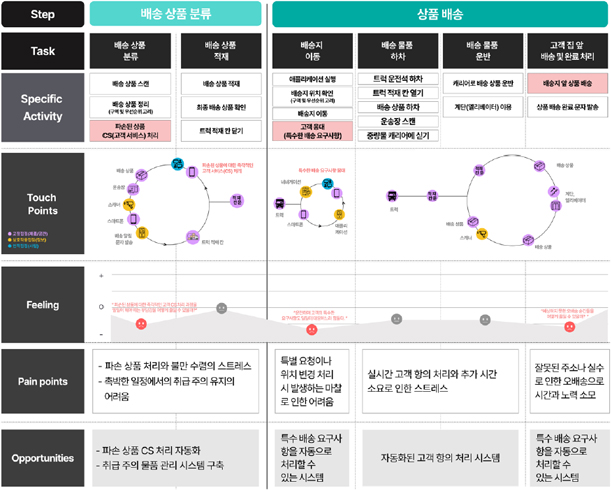
고객 여정 지도에서는 택배기사의 업무 중 라스트 마일 배송 구간을 ‘배송 상품 분류’와 ‘상품배송’의 두 단계로 나누어 고객여정을 분석하였다[Table 13]
Customer Experience Journey Map Analysis by Persona Type
① Persona A: Primary Persona
Primary Persona(Persona A)는 분류 및 적재 단계에서 비규격화된 물품의 수작업 분류와 라우트별 정리로 인해 신체적 부담과 시간 소모를 겪고 있었으며, 이를 해결하기 위해 자동화된 적재 시스템의 필요성이 확인되었다. 또한 배송지 도착 단계에서는 반복적인 중량물 운반과 협소한 공간에서의 작업이 주요 문제로 나타났으며, 이를 개선하기 위해 중량물 운반 지원 시스템과 AI 기반 로봇 서비스의 도입이 요구되었다[Table 13].
② Persona B: Secondary Persona
Secondary Persona(Persona B)는 적재 및 배송 단계에서 파손된 상품으로 인한 고객 불만과 클레임 처리로 심리적 부담을 겪고 있었으며, 이를 완화하기 위해 고객 서비스(CS) 처리 과정의 자동화가 필요하다는 점이 확인되었다. 또한 배송지 이동 단계에서는 고객의 특수 요구사항과 위치 변경 요청으로 인한 마찰이 주요 문제로 나타났으며, 이를 해결하기 위해 고객 요청 관리와 실시간 업데이트가 가능한 자동화 시스템의 도입이 요구되었다. 이 분석은 택배기사의 신체적·정신적 부담을 줄이고 업무 효율성과 고객 서비스 품질을 향상시키기 위해 자동화된 적재 및 클레임 처리 시스템, 중량물 운반 보조 도구, 실시간 고객 응대 시스템이 서비스 설계의 핵심 방향임을 제시하였다[Table 13].
4. 4. 인간-AI 협업 기회요인 도출
(1) 인간-AI 협업 기회요인 도출
이 장에서의 인간-AI 협업 기회요인은 물류 작업의 5가지 주요 단계(분류 및 적재, 배송 경로 관리, 배송 도착 관리, 고객 상호작용, 배송 현황 관리)에서 AI 기반 로봇 기술의 통합을 통해 효율성을 극대화하고 작업 부담을 완화할 수 있는 가능성을 제시하고자 하였다.
첫째, 분류 및 적재 단계(Level 2)에서는 AI 자동화 시스템이 실시간 물품 분류와 적재 순서를 최적화하여 택배기사의 신체적 부담을 줄일 수 있도록 제안했다. 둘째, 배송 경로 관리 단계(Level 3)에서는 AI가 교통 상황, 날씨, 긴급성을 분석해 최적 경로를 제안하고, 음성 지원을 통해 안내하여 택배기사가 실시간 교통경로를 전달받을 수 있도록 한다. 셋째, 배송 및 도착 관리 단계(Level 4)에서는 AI가 예상 도착 시간을 제공하고, 지연 및 부재 시 대체 수령 위치를 제안해주며, 택배기사와 협력해 안전한 배송을 지원한다. 넷째, 고객 CS 관리 단계(Level 5)에서는 AI가 일반 문의와 배송 상태 업데이트를 처리할 수 있도록 지원한다. 하지만, 복잡한 문제는 인간이 최종 판단하여 결정할 수 있다.
이러한 인간-AI 협업 시나리오는 AS-IS와 TO-BE 상태를 비교해 단계별 변화를 명확히 하며, 물류 작업 전반에서 더 원활하고 효율적인 택배 서비스를 창출할 수 있는 실질적인 설계 방향을 제공하였다[Table 14].
Human-AI Collaboration Service Opportunities
(2) 주요 Task에 따른 맞춤형 서비스 기회요인 도출
택배기사의 신체적·정신적 부담을 완화하고 작업 효율성을 높이기 위해, ‘중량물 운반 배송 AI 서비스’와 ‘고객 클레임 및 응대 AI 서비스’라는 두 가지 주요 영역에서 AI 서비스 기회요인을 도출하였다[Table 15].
Identifying Opportunity Factors by Key Tasks
첫째, 중량물 운반 배송 AI 서비스는 수작업 중심의 비효율성과 고객 요청·위치 변경으로 인한 마찰 문제를 해결하기 위한 방안을 제안하였다. 이를 통해 이중 모달리티 AI와 복합 상호작용의 자동화를 목표로 설정하였다. 개선된 시스템에서는 AI 로봇이 물품 적재칸을 자동 분류하고, 계단 운반, 장애물 대응, 오류 처리 등 물리적 작업을 택배기사와 협력하여 수행한다. 또한, 실시간 반품 절차와 수거 작업의 자동화를 통해 생산성을 크게 향상시킨다.
둘째, 고객 클레임 및 응대 AI 서비스는 파손 상품 및 주소 오류로 인한 클레임 처리 과정에서 발생하는 정신적 스트레스와 시간 소모를 줄이기 위한 방안을 제시하였다. 다중 모달리티 기반의 협력적 상호작용을 도입하여, 재방문 요청 처리, 주소지 변경, 중량물 수거 등의 작업을 자동화하고, 실시간 클레임 처리 시스템을 통해 고객과의 상호작용을 보다 원활히 수행하도록 설계하였다. 이러한 개선은 작업 효율성을 증대시키고 택배기사의 정신적 부담을 완화하는 데 기여한다.
이러한 협업 서비스 시나리오는 인간과 AI 간의 협력적 상호작용과 멀티모달 기술을 바탕으로, 물류 작업 전반에 걸쳐 지속 가능한 변화를 유도하며, 택배기사와 고객 모두에게 혜택을 제공하는 혁신적인 물류 서비스의 미래 방향성을 다음[Table 15]와 같이 제안하였다.
5. 서비스 경험 프로토타이핑 및 검증
5. 1. 인간- AI 기반 휴머노이드 로봇 간 협업 서비스 시나리오 설계
이 장에서는 라스트마일 배송 업무에서 중요한 두 가지 영역인 중량물 운반과 고객 클레임 응대를 중심으로 인간-AI 협업 서비스 시나리오를 설계하였다. 도출된 테스크별 서비스 기회요인을 기반으로, 택배기사와 AI 기반 휴머노이드 로봇의 역할을 명확히 구분하고 이를 구체화하였다. 이 과정에서는 역할 분담을 시각적으로 표현하기 위해 영상 콘텐츠를 제작하였으며, 각 영역별로 테스크, 터치포인트, AI 기반 서비스, 인간-AI 협업 수준을 세분화하여 서비스 시나리오를 구성하였다.설계 시에는 AI의 역할 수준(Tool, Assistant, Peer, Manager)을 고려하였으며 [Table 16], ATL(Levels of Artificial Intelligence Technology, Min et al., 2020)을 참조하여 협업 수준과 로봇 지능 단계를 설정하였다.
Human-AI Collaborative Service Scenario with Humanoid Robots
특히 이 연구에서는 Level 1(단순 데이터 입력 및 학습)과 Level 6(완전 자동화)을 제외한, Level 2~Level 5의 라스트마일 구간 내 주요 테스크를 중심으로 시나리오를 설계하였다.
제작된 시나리오의 적합성을 평가하기 위해, 택배기사 5명을 대상으로 심층 인터뷰를 실시하였다. 인터뷰에서는 시나리오와 협업 레벨이 인간-AI 기반 휴머노이드 로봇 협업 방안으로서의 적절성, 유용성, 가치를 갖추고 있는지를 검토하였다. 이를 통해, 전반적인 긍정적 피드백과 함께 향후 개선점을 도출할 수 있었다[Table 17].
Service Scenario In-Depth Interview Validation
5. 2. 서비스 경험 프로토타이핑 제작 및 검증
(1) 프로토타이핑 제작_Concept Video
프로토타이핑은 라스트 마일 구간에서 발생하는 다양한 업무를 지원하는 AI 로봇의 역할과 기능을 시각적으로 표현하기 위해 제작되었다. 본 프로토타입은 두 가지 주요 요소로 구성되며, 그 중 첫 번째는 콘셉트 비디오로, 서비스의 전체적인 흐름과 주요 기능을 시각적으로 전달하는 데 중점을 두었다.
이 콘셉트 비디오는 택배기사가 DillyROBO와 어떻게 상호작용하며 협업하는지, 그리고 최종적으로 배송이 어떻게 완료되는지 전 과정을 보여준다. 이를 통해 사용자들은 DillyROBO 서비스를 보다 쉽게 이해하고, 서비스의 개념과 가치를 명확히 인식할 수 있도록 구성되었다[Table 18].
Human-Humanoid AI Robot Collaboration Service (Concept Video)
① 물류센터에서는 상품 분류 및 배송 준비 작업이 이루어진 뒤, 택배 차량이 이를 픽업하여 각 배송 구간으로 이동한다.
② DillyROBO는 택배기사의 신체적·정신적 부담을 줄이기 위해 설계된 다양한 서비스를 제공하며, 고난도의 작업을 자율적으로 수행해 부담을 경감한다. 로봇은 앱과 연동되어 택배기사의 지시에 따라 작동하며, 배송지에 도착한 후 상품 적재와 이동을 지원한다.
③ 택배기사는 DillyROBO와 협력하여 상품을 고객에게 안전하게 전달한다. 단순한 배송 작업은 택배기사가 직접 수행하고, 난이도가 높은 작업은 로봇의 지원을 받는다. 택배기사는 모바일 앱을 통해 로봇을 제어하며, 배송지 및 로봇 상태를 실시간으로 모니터링하고, 오류 발생 시 즉각적으로 대응할 수 있다.
④ 모바일 애플리케이션은 로봇 서비스 플랫폼과 데이터를 송수신하며, 기기 연결 및 제어 기능을 지원한다. 이를 통해 실시간 상품 추적, 배송 상태 업데이트, 로봇 상태 모니터링, 오류 대응이 가능하다.
⑤ 고객은 실시간 CS 앱을 통해 주소 변경, 반품 신청, 클레임 접수 등의 서비스를 이용할 수 있으며, 필요한 경우 실시간 응대 서비스도 제공받는다.
⑥ 고객센터(CS Center)는 택배기사와 고객 모두를 위한 지원 허브 역할을 하며, 클레임 접수 확인과 효율적인 배송 운영을 지원한다.
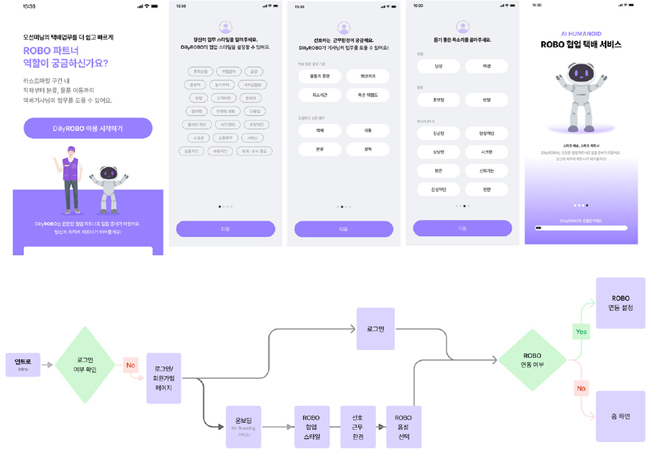
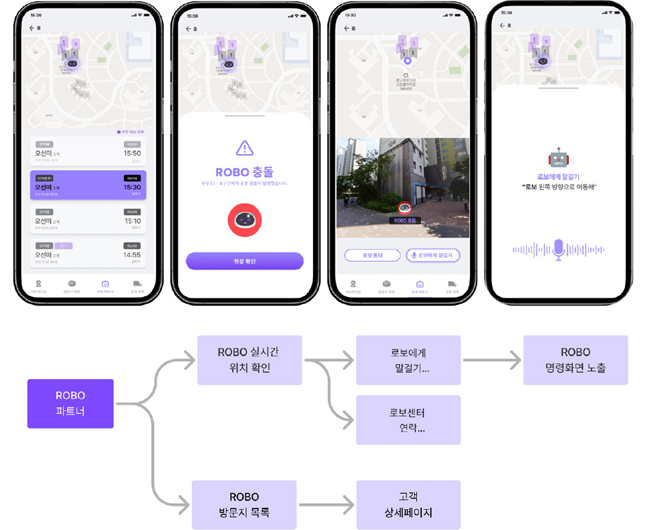
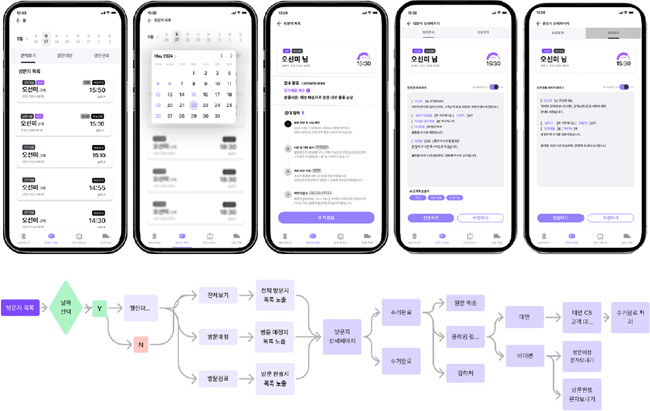
(2) 프로토타이핑 제작_Dilly ROBO App Service
DillyROBO App은 택배기사의 업무를 지원하기 위해 다양한 기능을 제공한다. 주요 기능으로는 로봇 상황 인지, 최적 경로 설정, 물품 적재 및 분류 제어, 고객 클레임 처리 등이 포함된다. DISC 업무 성향 분석과 선호도를 반영하여 개인화된 서비스를 제공하도록 설계되었다[Table 19].
Human-Humanoid AI Robot Collaboration Service_ROBO App service
① DillyROBO 파트너 서비스는 실시간 위치 확인, 당일 업무 내역 조회, 로봇 제어, 충돌 및 이벤트 발생 알림, 서비스 센터 연결기능을 포함한다.
② 방문지 목록에서는 당일 고객 명단 확인과 CS 발생 고객에 대한 음성 인식 기반 응대가 가능하다. 또한, 고객 데이터를 분석하여 맞춤형 응대 가이드를 자동으로 생성하는 기능도 제공된다.
③ 앱 인터페이스는 로봇 역할 안내, 스타일 설정, 홈 화면 및 알림 기능을 포함하며, 실시간 로봇 추적, 방문지 목록, 맞춤형 CS, 자동 문자 기록 등 효율적인 관리 도구를 제공한다.
(3) 서비스 경험 평가지표
본 연구의 평가과정에서는 DillyROBO 콘셉트 비디오와 DillyROBO 서비스(App)를 함께 평가하기 위해, 앞선 이론적 고찰에서 제시한 ‘인간-AI 기반 휴머노이드 로봇 환경에서의 AI 서비스’ 관점을 함께 고려하였다. 사용자 검증 시에는 피터 모빌의 허니콤 모델(Honeycomb Model, 2006)과 AI 관련 선행 연구를 참조하여, 서비스 경험 평가 요인을 다음 [Table 20]과 같이 설정하였다.
Service Experience Evaluation Metrics
(4) 프로토타이핑 검증
인간-AI 협업 시나리오의 효과성을 검증하기 위해 정성·정량 평가를 포함한 4단계 사용성 검증을 실시하였다. 검증은 2024년 6월 6일부터 6월 17일까지 진행되었으며, 총 22명의 택배기사가 참여하였다. 이 중 5명은 심층 인터뷰를 통한 정성평가, 17명은 프로토타입 테스트를 통한 정량평가에 참여하였다.
연구 참여자의 인구통계학적 특성은 다음과 같다. 성별은 남성 18명(81.8%), 여성 4명(18.2%)이었으며, 연령대는 20대 2명(9.1%), 30대 10명(45.5%), 40대 9명(40.9%), 50대 이상 1명(4.5%)으로 분포되었다. 근무 시간 기준으로는 주간 근무자가 18명(81.8%), 야간 근무자가 4명(18.2%)이었다. 경력은 1~3년차가 9명(40.9%), 4~6년차가 6명(27.3%), 7~9년차가 5명(22.7%), 10년차 이상이 2명(9.1%)으로 나타났다. 하루 평균 배달 건수는 1~200건이 7명(31.8%), 201~400건이 9명(40.9%), 401건 이상이 6명(27.3%)이었다.
검증은 정량평가와 함께 정성평가인 심층 인터뷰가 이루어졌다[Table 21].
Demographic Characteristics of Survey Participants(N=36)
사용자 검증에서는 라스트 마일 구간의 주요 업무 Task를 중심으로, ROBO 콘셉트 비디오 시청과 DillyROBO App 서비스 경험 평가가 함께 이루어졌다. 프로토타입 검증 절차는 다음 [Table 22]와 같이 구성되었다.
Prototype Validation Procedure
(5) 검증 결과
프로토타입 테스트 후 5점 척도에 기반한 정량 및 정성 조사 결과는 다음과 같다. 정량 평가에서는 환경 변화 및 교통 체증에 따른 실시간 서비스 연결성(76%)과 로봇 책임 소재의 불분명으로 인한 윤리성·책임성(70%) 측면에서 개선이 필요하다는 의견이 도출되었다.
반면, 오류 발생 시 수정 가능한 오류 회복성과 인간의 지시 및 감독(Control)의 중요성에 대해서는 매우 높은 평가(90%)를 받았다[Table 23].
Quantitative Evaluation Results
정성평가는 정량평가 설문과 함께 효율성, 인간-로봇 AI 협업, 신뢰, 로봇 윤리성, 상호작용성(멀티모달, 터치포인트_기기 연결성)의 5가지 검증 지표를 중심으로 진행되었다. 평가 결과, 멀티모달 기능이 통합적으로 활용될 때 택배기사와 로봇 간의 상호작용이 강화되며, 업무 효율성과 인간-AI 협업 수준이 향상된다는 점이 확인되었다. 또한, 로봇의 실시간 위치 파악과 문제 발생 시 즉각적인 대응은 작업 효율성을 높이는 중요한 요소로 평가되었다.
반면, 개인화 기능과 고객 클레임 처리에서는 터치포인트의 상호작용성이 부족하다는 의견이 제시되었다. 특히, 네트워크 연결 불안정이나 기기 간 연결 문제 발생 시 대처 방안이 미흡하다는 점과, 음성 인식의 한계로 인해 다양한 상황 변수가 발생할 수 있다는 지적이 있었다.
로봇 윤리성과 관련해서는 책임 소재를 명확히 하고 이를 규정할 수 있는 법적 가이드라인의 필요성이 강조되었다. 로봇의 역할이 확대됨에 따라, 이러한 윤리적 이슈는 향후 더욱 중요한 문제로 부각될 것으로 보인다.
다음 [Table 24]는 심층 인터뷰 기반 정성 평가에서 도출된 주요 인사이트를 정리한 것이다. 정량 및 정성 평가 결과는 향후 개선 방향을 명확히 설정하고, 실질적인 택배 서비스 구현을 위한 기초 자료로 활용될 수 있다.
Qualitative Evaluation Results
6. 인간-휴머노이드 AI 로봇 협업 시스템 개발을 위한 서비스 청사진 제시
6. 1. 시스템 맵
이 시스템 맵은 AI 기반 서비스를 활용하여 택배기사의 근로 환경 개선과 업무 효율화를 중심으로, 인간-로봇-고객-플랫폼 간 상호작용 구조를 시각적으로 설계한 것이다. 기존 택배 업무는 수작업 적재와 중량물 운반으로 인한 신체적 피로, 반복 업무로 인한 근골격계 부담, 주소지 변경과 클레임 처리 등에서 발생하는 정신적 스트레스가 복합적으로 작용하여 서비스의 지속가능성을 저해하고 있었다.
이러한 문제를 해결하기 위해, 라스트 마일 배송 구간에서 택배기사와 AI 기반 휴머노이드 로봇 간의 협업 시스템이 설계되었다. 로봇은 배송지 도착 후 상품 하차, 스캔 및 분류, 적재 순서에 따른 상차, 무거운 물품 운반, 계단 이동 등 반복적이고 자동화 가능한 작업을 수행하며, 택배기사는 로봇의 오류를 제어하고, 저층 주택에서는 가벼운 택배를 직접 배송하는 등 역할을 분담한다. 또한 고객 응대, 반품 및 집하, 클레임 처리 등은 실시간 AI 앱 서비스와 연동되어 자동화되며, 날씨와 교통 상황 같은 외부 변수는 실시간 데이터 분석과 경로 최적화를 통해 대응할 수 있도록 구성되었다.
고객센터는 택배기사와 고객을 연결하는 중앙 허브로, 클레임 접수와 배송 운영을 지원한다. 전체 시스템은 작업 효율성과 서비스 품질을 동시에 높이며, 인간-AI 협업 구조가 실제 업무 환경에 효과적으로 적용될 수 있는 기반을 제공한다. [Figure 2]는 이러한 상호작용 흐름과 시스템 구성 요소 간의 관계를 시각적으로 보여준다.

System Map
6. 2. 인간-AI 기반 휴머노이드 로봇 협업 서비스 블루프린트
이 장에서는 택배기사의 신체적·정신적 부담을 완화하고 고객 경험을 향상시키기 위해, 라스트 마일 배송 구간에서 인간-AI-휴머노이드 로봇 간의 역할과 상호작용을 구조화한 서비스 블루프린트를 제안한다. 이 블루프린트는 각 협업 주체의 기능을 단계별로 정의하고, 협업 수준을 통해 효율성과 안정성을 극대화하는 데 목적을 둔다.
서비스 블루프린트는 고객 행동, 프론트 스테이지, 백스테이지, 지원 프로세스, 상호작용선, 가시선, 내부 상호작용선으로 구성된다. 고객은 AI 기반 앱을 통해 배송 상태를 확인하고, 위치 변경, 반품, 클레임 등을 실시간으로 요청할 수 있다. 프론트 스테이지에서는 택배기사가 로봇과 협력하여 분류 및 적재를 수행하며, 로봇은 경로 최적화, 오류 감지, 반품 지원 등 반복적이고 자동화 가능한 작업을 담당한다. 백스테이지에서는 AI 시스템이 배송 데이터를 분석하여 최적 경로를 추천하고, 예측 가능한 오류를 사전에 감지·대응한다. 지원 프로세스는 로봇이 택배기사를 보조하며 물류 현장의 작업 효율을 높이고, AI는 클레임이나 오류 발생 시 자동으로 대응 프로세스를 가동한다. 전체 시스템은 상호작용선과 가시선을 기준으로 실시간 연동되며, 고객과 택배기사 모두에게 정보의 투명성과 신뢰성을 제공한다.
가로축의 여정 단계에서는 여섯 가지 협업 기회요인을 도출하였다.첫째, 배송물품 분류 및 수행 단계에서 AI는 물품 난이도와 경로를 분석하고, 로봇은 중량물 운반을 담당하며, 택배기사는 경량 물품을 배송하여 효율을 극대화한다. 둘째, 배송 완료 확인 단계에서는 로봇이 인증 데이터를 택배기사와 공유하고, 택배기사가 이를 확인하고 고객에게 도착문자를 보냄으로써 신뢰도를 높인다. 셋째, 배송 오류 발생 시, AI는 오류를 분석하고 해결 방안을 도출하며, 로봇은 즉각 대응하고 필요 시 택배기사가 보완을 요청한다. 넷째, 예외 상황 처리 단계에서는 AI가 음성 인식 기반 멀티모달 데이터를 처리하고, 로봇은 작업을 수행하며, 택배기사는 고객과 직접 소통하여 문제를 해결한다. 다섯째, 고객 클레임 응대 단계에서는 AI가 데이터를 분석해 실시간 대응하고, 로봇은 반품을 지원하며, 택배기사는 고객과의 직접 소통을 통해 신뢰를 구축한다. 여섯째, 반품 요청 처리 단계에서는 AI가 일정을 조율하고 앱·로봇 간 데이터를 연동하며, 로봇은 물품 수거를 수행하고 택배기사는 결과를 확인하여 최종 점검을 담당한다. 이 블루프린트는 인간-AI-로봇 간 협업의 구조를 정교하게 설계함으로써 작업 효율성과 고객 만족도를 동시에 높이는 것을 목표로 한다. 이를 통해 인간 중심의 기술 통합형 물류 모델을 구축하고, 보다 안정적이고 유연한 배송 서비스를 제공할 수 있을 것으로 기대하였다.[Figure 3]은 이러한 협업 구조를 시각화한 도식으로, 단계별 상호작용 흐름과 기회요인을 통합적으로 보여준다.

Human-AI Collaborative Service Blueprint
6. 3. 인간-AI 기반 휴머노이드 로봇 간 협업 서비스 제안
이 장에서는 AI 기반 휴머노이드 로봇과 택배기사 간의 협업을 통해 물류 서비스의 운영 효율성과 고객 경험을 동시에 향상시키기 위한 구체적인 서비스 모델을 제안한다. 제안된 협업 시스템은 기존의 단순 자동화를 넘어, 맞춤형 AI 협업 모드, 실시간 피드백 기반 학습 시스템, 예외 상황 대응 역량, 고객 중심 응대 기능, 그리고 터치포인트 기반 상호작용 설계 등 복합적인 기능을 통합함으로써 인간-AI 간의 유기적 협력을 실현하는 것을 목표로 한다.
우선, 배송물품 분류 및 수행 단계에서는 AI 휴머노이드 로봇이 실시간 스캔과 자동 분류, 중량물 운반 등 반복적이고 물리적인 작업을 수행하며, 택배기사는 로봇과 협력하여 적재 동선과 배송 순서를 최적화한다. 이 시스템은 자동, 보조, 수동 모드로 구성된 협업 인터페이스를 통해 작업자의 숙련도와 선호에 맞게 AI의 개입 수준을 조절할 수 있도록 설계되었다. 배송이 완료된 후에는 자동 데이터 기록과 실시간 작업 모니터링 기능을 통해 행정적 부담 또한 최소화된다.
안전 및 예외 상황 대응 측면에서는 AI 로봇이 시각 및 청각 기반의 멀티모달 센서를 통해 충돌, 장애물, 기상 변화 등 다양한 변수에 즉각적으로 반응하고, 축적된 Edge Case 데이터를 기반으로 최적의 대응 전략을 도출한다. 자율적 처리가 어려운 상황에서는 실시간 알람과 함께 택배기사에게 대응 가이드를 제공하며, ROBO 애플리케이션을 통해 음성 또는 텍스트 기반의 간편한 조치가 가능하도록 설계되었다. 더불어, 피드백 기반 학습 시스템은 반복적으로 발생하는 문제 상황을 지속적으로 학습하여 향후 대응 역량을 점진적으로 개선할 수 있도록 지원한다.
고객 클레임 및 응대 단계에서는 AI가 반품 요청을 자동 수집하고, 고객 유형 분석을 기반으로 맞춤형 안내 메시지 전송, 방문 일정 조율, 운송장 인식 및 반품 물품 식별. 보안과 같은 작업을 수행한다. 반복적인 고객 응대 업무는 AI가 주도함으로써 택배기사는 복잡하거나 예외적인 상황에 보다 집중할 수 있으며, 이로 인해 정신적 부담의 감소와 서비스의 정밀도 향상이라는 이중의 효과가 기대된다.
고객 중심 AI 서비스 설계는 고객의 요청 사항을 자동 인식하고, 챗봇과 실시간 상담 시스템을 통해 신속하게 응답할 수 있는 구조로 구성되었다. 고객의 배송 일정 변경, 보관 장소 지정, 보안 등 다양한 요구사항은 AI를 통해 실시간으로 반영되며, AI는 고객 피드백을 학습하여 지속적인 서비스 품질 개선을 가능하게 한다. 이와 같은 커뮤니케이션 구조는 고객과 택배기사 간의 정보 비대칭을 줄이고, 클레임 발생률을 낮추는 데 기여한다.
터치포인트 기반 인간-AI 협업 설계에서는 휴머노이드 로봇과 앱이 실시간으로 연동되어 다양한 디지털 기기와의 연결성을 확보하며, 직관적인 사용자 인터페이스를 통해 상호작용성을 극대화한다. 이 시스템은 설명 가능한 AI(eXplainable AI, XAI) 기술을 도입하여, 택배기사에게 명확한 의사결정 근거를 제공하고, 경력과 숙련도에 따른 맞춤형 작업 안내를 통해 작업 오류를 방지함으로써 현장 신뢰도를 강화할 수 있도록 하였다.
종합적으로, 본 협업 모델은 단순한 자동화 단계를 넘어선 인간-AI 간의 실시간 상호작용과 역할 분담을 기반으로 하여, 물류 작업의 효율성과 고객 중심 서비스 품질을 동시에 향상시키는 지속 가능한 물류 시스템으로 발전할 수 있는 가능성을 제시한다. 이 협업 모델은 향후 다양한 작업 환경과 시나리오에 적응할 수 있는 확장성과 유연성을 갖춘 기반 기술로, 물류 산업의 디지털 전환과 서비스 혁신을 가속화하는 데 실질적으로 기여할 수 있을 것이다. 협업의 기회 요인과 개선 방향은 다음 [Table 25]와 같이 정리하였다.
Proposed Levels and Roles of Human-Humanoid AI Robot Collaboration
7. 결론 및 제언
7. 1. 연구요약
본 연구는 라스트 마일 배송 구간에서 인간-AI 기반 휴머노이드 로봇 협업 시스템을 설계하고 검증함으로써, 택배기사의 신체적·정신적 부담을 완화하고 물류 서비스의 운영 효율성과 고객 경험을 동시에 향상시키는 것을 목표로 하였다. 특히 AI 기반 휴머노이드 로봇이 반복적이고 물리적인 작업을 담당하고, 택배기사는 창의적 의사결정과 고객 응대에 집중하는 방식의 인간-AI 협업 구조를 구체화하였다.
심층 인터뷰와 사용자 조사를 통해 도출된 핵심 문제는 수작업 중심의 적재 작업으로 인한 누적된 신체 피로, 고객 클레임 처리 과정에서의 정신적 스트레스, 그리고 예외 상황에 대한 실시간 대응의 어려움이었다. 이러한 문제 인식을 바탕으로 본 연구는 협업 시나리오를 설계하고 프로토타입을 개발하여, 인간과 AI 간 상호 보완적 역할 분담의 타당성과 효과를 검증하였다.
검증 결과, AI 기반 휴머노이드 로봇은 중량물 운반, 작업 분류, 반품 수거 등 고강도 반복 작업에서 탁월한 효율 향상을 제공하였으며, 음성, 시각, 터치 등 다양한 감각 채널을 활용한 멀티모달 상호작용 기능을 통해 사용자 맞춤형 협업 수행이 가능함을 확인하였다. 또한, 실시간 모니터링과 피드백 기반 학습 시스템이 협업의 지속 가능성과 업무 적응력을 강화하는 데 기여하였다. 반면, 윤리적 책임성, AI 오류 인식의 명확성, 터치포인트의 기기 간 연동성, 보안기능은 향후 보완이 요구되는 핵심 요소로 도출되었다.
본 연구는 기존 물류 자동화 시스템과 차별화되는 다음 네 가지 설계 원칙을 바탕으로, 새로운 인간-AI 협업 모델을 제안하였다. 첫째, 사용자 선호도에 따라 AI 개입 수준을 조절할 수 있는 맞춤형 AI 협업 모드를 도입하였다. 둘째, 반복적 오류 상황에 대한 대응 전략을 지속적으로 개선할 수 있도록 실시간 피드백 기반 학습 시스템을 구축하였다. 셋째, 예기치 않은 충돌, 지연, 고객 요청 등 다양한 변수를 고려한 유연한 협업 구조를 설계하였다. 넷째, 고객 요구를 자동 인식하고 실시간으로 대응할 수 있는 고객 중심 AI 응대 서비스를 구현하였다.
AI 기반 휴머노이드 로봇은 복잡한 도심 환경, 열악한 날씨, 접근이 어려운 지역 등에서도 안정적으로 작동할 수 있도록 설계되었으며, 자동 분류, 경로 최적화, 반품 처리 등 물류 전반의 생산성을 크게 향상시킬 수 있다. 특히 AI와 인간 간의 상호작용은 작업자의 숙련도, 근무 환경, 선호도에 따라 유연하게 조정될 수 있어, 사용자 중심의 적응형 협업 모델로서 높은 확장 가능성을 지닌다.
결론적으로 본 연구는 인간과 AI 기반 로봇이 상호 보완적인 파트너로서 협력할 수 있는 새로운 물류 서비스 모델을 제안하였으며, 이는 향후 택배 산업의 디지털 전환, 노동 환경 개선, 그리고 지속가능한 물류 혁신을 견인할 수 있는 실질적이고 실행 가능한 기반으로 제안하였다.
7. 2. 시사점과 한계점
이 연구는 인간-AI 기반 협업 시스템이 물류 산업에 미치는 영향을 학문적 시사점과 실무적 시사점의 두 관점에서 분석하고, 그 한계점을 통해 향후 연구의 발전 방향을 제시하였다.
먼저, 학문적 시사점으로 본 연구는 인간-AI 협업에서 고려해야 할 핵심 요인인 ‘협업 수준’, ‘신뢰 형성’, ‘윤리 기반 설계’, ‘상호작용 구조’를 이론적으로 고찰하고, 이를 물류 산업이라는 현실적 맥락에 맞게 재정의하였다. 특히, AI와 인간 간의 신뢰 형성과 책임 분배, 오류 대응과 고객 클레임 처리에서의 협업 가능성을 구체적으로 분석함으로써 협업 구조 설계의 학술적 타당성을 강화하였다. 또한, 멀티모달리티를 활용한 입력 및 출력 방식의 다양화를 통해, 환경 변화에 유연하게 대응하는 인간-AI 협업 수준의 체계를 학문적으로 정립하였다.
실무적 시사점으로는, 휴머노이드 AI 로봇이 택배기사의 반복적이고 물리적으로 과중한 작업(상·하차, 분류, 중량물 운반 등)을 분담함으로써 작업 효율성을 실질적으로 향상시키고, 근로자의 노동 강도를 완화할 수 있음을 실증적으로 확인하였다. 이를 통해 택배기사는 근무 만족도와 성취감을 높이고, 고객은 보다 신속하고 정확하며 안전한 배송 서비스를 통해 높은 서비스 만족도를 기대할 수 있다. 나아가 AI 기반 휴머노이드 로봇은 물류 산업 전반의 생산성과 안정성을 향상시킴으로써 산업 경쟁력 강화에 기여할 수 있으며, 이러한 협업 모델은 유통, 제조, 보건 등 다양한 산업 영역으로의 확장 가능성 또한 제시하였다.
그러나 본 연구에는 몇 가지 한계점이 존재한다. 첫째, 연구의 실증 검증은 제한된 사용자 그룹과 환경 내에서 수행되었기 때문에, 다양한 산업 현장과 작업 조건을 반영한 장기적 검증이 필요하다. 둘째, 인간과 AI 로봇 간 협업 시스템이 지속적인 성능을 발휘하기 위해서는 보다 광범위한 데이터 수집과 변인 통제가 요구되며, 다층적 사용자 니즈에 기반한 분석이 병행되어야 한다. 셋째, 고객 응대 및 윤리적 책임과 관련된 AI의 의사결정 과정에 대한 정량적 신뢰성 확보 역시 향후 연구의 핵심 과제로 남아 있다.
향후 연구에서는 협업의 지속성과 신뢰성을 확보하기 위해 다양한 산업 환경과 사용 시나리오에 대한 실증 검증이 필수적이다. 특히, 멀티모달 상호작용의 정밀성, 터치포인트의 연결 안정성, 작업 유형별 협업 수준의 적합성 등을 심층적으로 분석함으로써, 인간과 AI 로봇 협업 모델이 실제 산업 현장에서 실질적으로 작동할 수 있도록 발전시켜야 한다. 아울러, 윤리적 설계 기준 수립, 설명 가능한 AI 적용, 고객 신뢰 형성을 위한 정서적 인터페이스 디자인 등의 논의도 병행될 필요가 있다.
따라서, 본 연구는 택배 산업을 넘어 인간과 AI 간 상호보완적 협업의 실현 가능성을 제시함으로써, 향후 다양한 산업 분야에서 AI 기반 휴머노이드 로봇 시스템이 적용될 수 있는 이론적·실무적 기반을 마련하였다. 이는 단순한 자동화 기술을 넘어서 지속가능한 인간 중심 AI 협업 체계 구축이라는 관점에서 의미 있는 학술적·산업적으로 기여하고자 한다.
Notes
Copyright : This is an Open Access article distributed under the terms of the Creative Commons Attribution Non-Commercial License (http://creativecommons.org/licenses/by-nc/3.0/), which permits unrestricted educational and non-commercial use, provided the original work is properly cited.
References
-
Apraiz, A., Lasa, G., & Mazmela, M. (2023). Evaluation of user experience in human-robot interaction: A systematic literature review. International Journal of Social Robotics, 15(2), 187-210.
[https://doi.org/10.1007/s12369-022-00957-z]

-
Aslam, I., Aniculaesei, A., Buragohain, A., Bamal, D., & Rausch, A. (2024). Runtime safety assurance of autonomous vehicles used for last-mile delivery in urban environments. In Next Chapter in Mobility: Technische und betriebswirtschaftliche Aspekte (pp. 399-414). Springer Fachmedien Wiesbaden.
[https://doi.org/10.1007/978-3-658-42647-7_27]
- Barocas, S., Hardt, M., & Narayanan, A. (2019). Fairness and machine learning. Cambridge, MIT Press.
-
Bitner, M. J., Ostrom, A. L., & Morgan, F. N. (2008). Service blueprinting: A practical technique for service innovation. California Management Review, 50(3), 66-94.
[https://doi.org/10.2307/41166446]
- Brynjolfsson, E., & McAfee, A. (2017). Machine, platform, crowd: Harnessing our digital future. W. W. Norton & Company.
-
Ha, N. T., Akbari, M., & Au, B. (2023). Last mile delivery in logistics and supply chain management: A bibliometric analysis and future directions. Benchmarking: An International Journal, 30(4), 1137-1170.
[https://doi.org/10.1108/BIJ-07-2021-0409]
-
Hara, T., Sato, T., Ogata, T., & Awano, H. (2023). Uncertainty-aware haptic shared control with humanoid robots for flexible object manipulation. IEEE Robotics and Automation Letters, 8(10), 6435-6442.
[https://doi.org/10.1109/LRA.2023.3306668]
-
Hoffmann, T., & Prause, G. (2018). On the regulatory framework for last-mile delivery robots. Machines, 6(3), 33.
[https://doi.org/10.3390/machines6030033]
-
Honig, S., & Oron-Gilad, T. (2018). Understanding and resolving failures in human-robot interaction: Literature review and model development. Frontiers in Psychology, 9, 861.
[https://doi.org/10.3389/fpsyg.2018.00861]
-
Jaimes, A., & Sebe, N. (2007). Multimodal human-computer interaction: A survey. Computer Vision and Image Understanding, 108(1-2), 116-134.
[https://doi.org/10.1016/j.cviu.2006.10.019]
-
Janina, L. (2019). Responsibility and robot ethics: A critical overview. Philosophies, 4, 58.
[https://doi.org/10.3390/philosophies4040058]
- Kang, M., & Park, D. (2018). Last-mile delivery: Capturing the last mile market of parcel logistics. Samjong KPMG, 98.
- Kim, I., & Hur, J. (2022). A study on the main improvement plans for the user experience of serving robots from a Human-in-the-loop perspective. Proceedings of the Ergonomics Society of Korea 2022 Fall Conference.
- Kim, J., & Hwang, M. (2021). Problems and improvement plans for the working environment of courier drivers. Seoul Institute Policy Report, 319.
-
Kore, A. (2022). Designing human-centric AI experiences. Apress.
[https://doi.org/10.1007/978-1-4842-8088-1]
- Kore, A. (2022). The role of AI in human-AI collaboration. International Journal of Robotics and Automation, 58(4), 234-256.
- Lee, J. (2020). A study on the impact of artificial intelligence on decision-making (Doctoral dissertation). Sookmyung Women's University.
- Lee, J., Suh, B., & Kwon, Y. (2021). A study on the impact of artificial intelligence on decision making: Focusing on human-AI collaboration and decision-maker's personality trait. Journal of Intelligence and Information Systems, 27(3), 231-252.
- Lechner, M., et al. (2020). What is multimodality? arXiv preprint arXiv:2103.06304.
-
Lipton, Z. C. (2018). The mythos of model interpretability. Communications of the ACM, 61(10), 36-43.
[https://doi.org/10.1145/3233231]
- Logiwa. (2023). Optimizing fulfillment operations for e-commerce: Current trends and future directions. Logiwa Whitepaper Series.
- Malone, T. W., Laubacher, R., & Johns, T. (2020). The future of work: How artificial intelligence will transform business, work, and society. MIT Press.
- Min, O. K., Kim, Y. G., et al. (2020). ATL 1.0: Definition of artificial intelligence technology levels. ETRI Journal of Electronics and Telecommunications Trends Analysis, 35(3), 1-8.
- Min, S. (2020). Understanding AI technology levels and human-AI collaboration. Computational Intelligence Review, 30(2), 98-112.
-
Na, H. S., Kweon, S. J., & Park, K. (2022). Characterization and design for last mile logistics: A review of the state of the art and future directions. Applied Sciences, 12(1), 118.
[https://doi.org/10.3390/app12010118]
-
Oviatt, S. (1999). Ten myths of multimodal interaction. Communications of the ACM, 42(11), 74-81.
[https://doi.org/10.1145/319382.319398]
- Oviatt, S. (2003). Multimodal interfaces. In The human-computer interaction handbook: Fundamentals, evolving technologies and emerging applications (pp. 286-304).
-
Raji, I. D., Gebru, T., Mitchell, M., Buolamwini, J., Lee, J., & Denton, E. (2020, February). Saving face: Investigating the ethical concerns of facial recognition auditing. In Proceedings of the AAAI/ACM Conference on AI, Ethics, and Society (pp. 145-151).
[https://doi.org/10.1145/3375627.3375820]
-
Rakyta, M., Bubenik, P., Binasova, V., Micieta, B., & Staffenova, K. (2022). Advanced logistics strategy of a company to create sustainable development in the industrial area. Sustainability, 14(19), 12659.
[https://doi.org/10.3390/su141912659]
-
Sferrazza, C., Huang, D. M., Lin, X., Lee, Y., & Abbeel, P. (2024). Humanoidbench: Simulated humanoid benchmark for whole-body locomotion and manipulation. arXiv preprint arXiv:2403.10506.
[https://doi.org/10.15607/RSS.2024.XX.061]
- Shaklab, E., Karapetyan, A., Sharma, A., Mebrahtu, M., Basri, M., Nagy, M., ... & Dias, J. (2023). Towards autonomous and safe last-mile deliveries with AI-augmented self-driving delivery robots. arXiv preprint arXiv:2305.17705.
-
Turk, M. (2014). Multimodal interaction: A review. Pattern Recognition Letters, 36, 189-195.
[https://doi.org/10.1016/j.patrec.2013.07.003]
-
Zanzotto, F. M. (2019). Human-in-the-loop artificial intelligence. Journal of Artificial Intelligence Research, 64, 243-252.
[https://doi.org/10.1613/jair.1.11345]
- https://robotsguide.com/robots/starship.
- https://medium.com/nuro/introducing-our-next-generation-nuro-8c1c63488342.
- https://www.aboutamazon.com/news/transportation/meet-scout.
- https://daxbot.com/faq.
- https://news.sbs.co.kr/news/endPage.do?news_id=N1007625771.