Analytical Interpretation of the Relationship Between the Functional Movement Factors of Speed, Volume, and Direction for Home Appliances and Product Emotions
Abstract
Background This study examines how controlling the physical movement components of home appliances can evoke positive product emotions, focusing on the relationship between the movement components of speed, volume, and direction, and user emotions.
Methods Case analyses of an electric fan, robot vacuum cleaner, and rollable TV were conducted using a movement component analysis model. Experimental stimuli based on robot vacuums were then created to test whether adjusting movement components can reduce negative emotions and enhance positive ones.
Results The experiments confirmed that functional movements in home appliances evoke specific product emotions. Consistent emotional patterns were observed across different products based on movement variables. Among various emotions, “Comfort” had the most significant impact on participants’ emotional responses.
Conclusions The study concludes that “Comfort” is pivotal in determining user preference for appliance movements. Deviations from expected movements tend to evoke stronger emotional responses, emphasizing the need for careful movement design.
Keywords:
Physical Movement, Motion Design, Product Emotion, User Experience, Movement Components1. Introduction
Convenience is one of the primary considerations when consumers purchase home appliances. According to Lui (2009), home appliances exist to secure user convenience by automating manual tasks at home. Thus, the evolution of home appliances demonstrates a process in which these products, originally designed to perform their functions reliably, become increasingly automated to enhance user convenience. As one of the methods to enhance convenience, more and more products are incorporating physical movement elements, minimizing the user’s movements while expanding the product’s functions or applying abundant interactions. Jeon and Jung (2021) classified movements-applied electronic products into three phases based on the degree of the movement integration. Early models of home appliances applied internal component movements, such as the blade rotation of electric fans, primarily to perform functions. Later, physical movements were expanded—though still limited—such as the head rotation of fans or air purifiers and the movement of air-conditioner blades, thereby expanding the range of the product performance and improving convenience. These movements focus on enhancing user convenience by reducing manual effort and optimizing performance. Recently, products such as robot vacuum cleaners and TVs with moving screens and speakers have been developed to minimize user effort and maximize convenience by more actively incorporating physical movements. These movements not only serve functional purposes, such as cleaning or revealing the TV screen, but also play a significant role in fostering emotional engagement and enriching the user’s sensory and emotional experience. This distinction between functional convenience and emotional interaction highlights the dual purposes of physical movement in product design. Whether movements serve functional purposes or deliver aesthetic effects, they can also stimulate the user’s senses, providing rich emotional experiences. For example, as Aarron Walter discusses in Designing for Emotion (2011), a pop-up toaster can evoke cheerful emotions through its dynamic and engaging motion, which creates a sense of delight during interaction. According to Keysers et al. (2004), this phenomenon occurs because humans project themselves onto moving objects based on prior experiences, leading to sympathy and empathy with them.
Unlike software-based interactions, which primarily focus on delivering visual or auditory feedback, physical movements establish a more direct sensory connection between the product and the user. This capability not only evokes emotions through tangible interactions but also provides practical benefits. Optimizing the physical movements of existing products enhances emotional satisfaction while maintaining intuitive functionality, making it a cost-effective way to improve user experience. Such improvements align seamlessly with the functional purpose of home appliances, ensuring both practicality and emotional engagement.
Research on movement in product design explores how movements not only perform intrinsic functions but also form emotional relationships with users, enriching interaction. While Desmet (2010) provides a foundational framework for understanding product-specific emotions, this study incorporates additional perspectives to offer a more comprehensive view. Wallbott (1998) highlights how attributes like speed, volume, and direction influence emotional responses, emphasizing the dynamic relationship between movement and emotion. Similarly, Hummels et al. (2007) argue that kinetic interactions enrich user experiences by combining physical engagement with emotional resonance. Miyoshi (2019) further explores how users project emotions onto non-anthropomorphic objects based on movement characteristics, demonstrating the importance of movement attributes in eliciting empathy and emotional engagement. These studies collectively illustrate how product design can evoke nuanced emotional responses through targeted movement design. In home appliances, designing movements that create positive emotional connections is crucial, as negative emotions can impact consumer purchases, continued use, repurchases, and brand image. Therefore, this study aims to explore how optimizing the movement components of home appliances can enhance positive product emotions. By analyzing cases of physical movements in everyday home appliances, we seek to understand the relationship between these movement components and the emotions they evoke. The study will also investigate whether adjustments to these movement components, aligned with the product’s original attributes, can enhance positive emotions and reduce negative ones.
2. Product Movement and Emotion
Studies on movement designs of artifacts and user emotions are predominantly focused on robots that mimic human or animal appearance and behavior. Masuda et al. (2010) designed the humanoid robot movements by controlling variables based on Laban’s theory and explored methods to express four basic human emotions. English et al. (2017) studied how a humanoid robot’s movements could express five emotions that children with autism spectrum disorder (ASD) find difficult to identify, conducting experiments to see if the intended emotions were recognized. Kim and Oh (2018) developed a basic social robot with preferred physical appearance elements and created movement simulations by controlling variables like the angle and frequency of head nodding and shaking, investigating the expression of six basic human emotions and user perception levels. Lee and Nam (2007) proposed a framework illustrating the relationship between movements and emotions, developed an emotionally responsive device modeled after animal palpi, and validated the framework through its expression. Bucci et al. (2018) created a furry robot to test whether users could detect whether the robot is happy or upset based on its breathing patterns. Studies have also examined crowd or swarm movements formed by multiple entities. Park and Jung (2019) designed an artwork exploring crowd movements, focusing on overlapping and repetitive individual movements rather than single entity-oriented movements that imitate human and animal forms. María Santos (2020) studied methods of expressing six basic human emotions with movements of a swarm of small mobile robots and provided a framework for emotion expression when a team of robots performs. Other studies have created prototypes of moving artifacts for experimental purposes. Weerdesteijn et al. (2005) developed a prototype for children’s emotion education using physical movements to express six emotions, conducting experiments on the emotional impact of these movements on users. Miyoshi (2019) created a moving object and observed and tested its movements to analyse the main elements that allow users projected themselves onto the moving object and empathised kinesthetically with the movement.
Previous studies on movements and emotions can be understood by examining the emotions evoked by movements. Frijda (1986) introduced the concept of ‘energy level’ to classify basic emotions, where each emotion ranges from active to passive. Meijer (1989) proposed the dimension ‘directness’ to demonstrate that emotional expression through movement can be direct or undirected. Wallbott (1998) proposes a functional classification of movement that underlines emotion expression. Hummels (2007) found Laban’s movement analysis valuable for designing movement. Crane and Gross (2007) show the relationship between the velocity or posture of movements that produce gaits and the basic human emotions. These studies have analysed movements primarily from the perspective of basic human emotions in social contexts. However, since users do not form social relationships with home appliances, such as washing machines and microwave ovens, it is inappropriate to apply the method of robotic products that are based on social psychological perspectives of human emotions. Therefore, research should be conducted from a perspective of product relevant or evoked emotions.
According to Desmet (2010), designing products requires considering product-specific emotions rather than basic human emotions. Basic human emotions (joy, sadness, fear, anger) are biased towards unpleasant emotions, creating an imbalance, and they do not encompass the subtle and specific emotions associated with product appearance. Desmet classifies product emotions into eight categories based on combinations of Unpleasant-Pleasant and Calm-Excitement. This study aims to analyse product emotions from the positive and negative emotions, as products are ultimately designed to evoke positive responses. Desmet also developed PrEmo, an emotion measurement method, which focuses on measuring the emotion evoked by the product appearance, rather than the emotion arising from the whole product consumption experience, including purchasing and owning. In this study, we use PrEmo to conduct experiments. PrEmo consists of seven positive and seven negative emotions, represented by human figures that express these emotions. This method reduces misunderstandings from cultural differences in facial expressions and body gestures and alleviates the difficulty respondents may have in verbally expressing their emotions. The use of visual representations allows participants to engage with the experiment more intuitively and actively.
3. Experiments on Home Appliances’ Functional Movements and Product Emotions
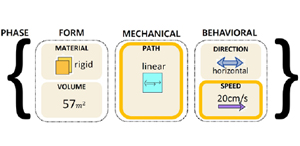
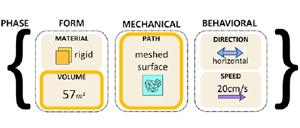
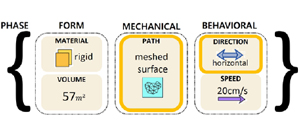
Movements consist of formal characteristics, and it has been continuously attempted to distinguish them. Young et al. (2005) hypothesised that movements would enrich product behavior and developed a movement language, classifying product movements into Path, Direction, Volume, and Speed. Parkes and Ishii (2009) emphasised the potential of movements as a design language, advocating the need for tools to conceptualize physical transformations. They argued that a movement comprises several phases, which were analysed using Material, Mechanical, and Behavioural variables. Jeon and Jung (2021) proposed an analysis model by integrating the movement components, as illustrated in Fig. 1, based on the above two studies by Young et al. (2005) and Parkes and Ishii (2009) and the definition of movement.

Physical movement component analysis model (Jeon and Jung, 2021)
To achieve the goal of this study, experiments were designed based on the movement components applied to the product. Using the physical movement component analysis model of Fig. 1, we defined the movement components and attributes of home appliances as variables and established three hypotheses.
H1. Functional movements applied to products will evoke specific product emotions in users. In this study, ‘functional movements’ are defined as those directly supporting a product’s primary function, such as air circulation in fans or cleaning in robot vacuums. Movements primarily serving aesthetic or emotional purposes, like in Alessi’s AnnaG, are excluded, as they lack operational relevance.
‘Specific product emotions’ refer to measurable emotional responses, such as satisfaction, fascination, and comfort, directly triggered by a product’s movement attributes. For instance, the oscillation of a fan may evoke satisfaction due to its functional effectiveness, while the smooth motion of a robot vacuum may induce comfort. These hypotheses are informed by the observation that users often anthropomorphize or project themselves onto moving objects, even when these movements are not intentionally designed to elicit emotions.
H2. Different types of products, even with varying shapes and movement objectives, will evoke similar emotions based on movement component variables.
This hypothesis treats movement as a universal design element, focusing on attributes like speed, volume, and direction. By controlling these variables, we aim to demonstrate that consistent emotional responses can be elicited across diverse products, regardless of their shape or function. For example, fans, robot vacuums, and TVs may evoke similar emotions like satisfaction or fascination when their movement components are optimized.
H3. Altering a product’s movement components can reduce negative emotions and enhance positive ones.
This hypothesis investigates whether modifying movement attributes can shift emotional responses toward positive outcomes. By adjusting factors like speed or direction, designers can enhance user satisfaction and reduce discomfort, validating movement as a key tool for improving emotional engagement in product design.
The study consisted of two distinct stages. The first experiment aimed to validate H1 and H2, while the second experiment was conducted to validate H3. Limitations identified during the first experiment were addressed and improved upon in the second experiment.
3. 1. Validation of H1 and H2
We selected experimental stimuli among the home appliances with functional movements, as shown in Fig. 2, based on the activeness and ubiquity of these movements. The selection included three types of products with varying levels of movement complexity: (1) fans, which are widely familiar and apply simple, functional movements like head oscillation; (2) robot vacuum cleaners, which are relatively recently commercialized and exhibit more active and diverse movements; and (3) rollable TVs, which feature new and unexpected movements aimed at enhancing user engagement. This selection ensured a balance between familiarity, functionality, and emotional engagement, allowing for comprehensive analysis of movement impacts. The selected models were the best-selling products in South Korea in the third quarter of 2021.

Experimental stimuli: electric fan, robot vacuum cleaner, and rollable TV
(1) Electric fans (head’s rotational movement): Simple and familiar movements; Xiaomi - Mi Smart Standing Fan 2
(2) Robot vacuum cleaners (straight linear movement): Recently commercialized, showing more active and varied movements; Qihoo 360 - S9
(3) Rollable TV (screen’s up and down movements): Featuring new and unexpected movements; LG – Signature OLED R
Speed was selected as the primary variable, as it is easily controllable in commercial products and produces noticeable visual changes. Videos capturing the movements of these products at low speed (50%), basic speed (100%), and high speed (300%) were used as experimental stimuli, ensuring that participants could clearly perceive the speed differences. The high-speed setting of 300% was chosen based on the need for a clear perceptual contrast with the baseline speed of 100%. This setting was informed by findings in perceptual psychology, emphasizing the importance of strong and distinct stimuli for reliable user responses (Frontiers in Psychology, 2017)
Six participants were selected for their high familiarity with electronic products: four were electronic product industry professionals, and two were product design majors. Four out of the six people were males and two were females. Two persons were in their twenties, and four persons in their thirties.
The experiment was conducted in two formats: face-to-face and online. While the face-to-face format was the primary method, an optional online format was provided to enhance accessibility. Both formats followed identical procedures and experimental content, differing only in the mode of participation. Participants in the two formats were distinct groups, and no individual participated in both. For the face-to-face sessions, participants were provided with questionnaires and watched experimental videos on a 15-inch laptop screen in a quiet room with controlled lighting and temperature (23°C ± 2°C). The duration of each session was approximately 20 minutes. For the online sessions, participants accessed the videos and questionnaires through Zoom, ensuring they were conducted in a private, distraction-free environment. All participants used the same video resolution (1080p) and completed the questionnaire immediately after watching each video. The experiment followed these steps:
(1) Introduction
Participants were informed about the experiment, focusing on the movement while disregarding other product elements (e.g., shape, colour, material). They were allowed to watch the videos as many times as they needed, but were asked to report the primary emotion they experienced using a predefined list of emotions.
(2) Watching videos
Participants viewed nine videos—three speeds for each of the three products—in a predetermined order.
(3) Questionnaire responses
Participants completed a questionnaire shown in Fig. 3 immediately after watching each video, resulting in nine responses per participant. PrEmo was used in the questionnaires, including an option for “Felt no emotion.” Participants were allowed to choose multiple emotions and rated the intensity of each emotion felt (1: very slight – 5: very strong).

Example of Experimental Screen
(4) In-depth Interview
After completing the questionnaires, participants were interviewed about their emotional responses, changes in emotion, and any limitations of the experiment. Interviews were recorded with consent.
Participants rated their emotional responses on a 1-5 scale, similar to a Likert scale. This approach aligns with standard practices in emotional measurement, providing a consistent and systematic method to quantify emotional intensity using descriptive statistical analysis. The scores were treated as continuous data, and mean values were calculated to evaluate the emotional responses to different movement attributes.
(1) Emotion evoked by functional movement (H1)
• Electric fan: The chart at the top in Fig. 4 shows the results of the emotions evoked by the changes in the movement speed applied to the electric fan. At the basic speed (100%), five positive emotions were evoked (Hope: a score of 1.33, Desire: 1.17, Satisfaction: 1, Joy: 0.83, Fascination: 0.67) and four negative emotions (Disgust: a score of 1, Fear: 0.5, Boredom: 0.5, Shame: 0.33), totaling nine emotion types. Hope and Desire being the strongest. In contrast, at 50% speed, fewer emotions were evoked (five types; four positive emotions and one negative emotion), with Boredom (a score of 2.0) being the strongest. At 300% speed, two types of negative emotions and two types of positive emotions were evoked, showing increased Satisfaction: a score of 1.17 and Fear: a score of 1.17.

Charts of experimental results for each product(top: electric fan, middle: robot vacuum cleaner, bottom: rollable TV)
• Robot vacuum cleaner: The middle chart in Fig. 4 shows the results of the emotions evoked according to the change in the movement speed applied to the robot vacuum cleaner. At 100% speed, five types of positive emotions and two types of negative emotions were evoked, totaling seven emotion types. Among these, “Joy: a score of 1.67” and “Hope: a score of 1.33” were the most prominent. At 50% speed, two types of positive emotions and three types of negative emotions were evoked, totaling five emotion types, with “Boredom: a score of 1.83” being the strongest. At 300% speed, five types of positive emotions and no negative emotions were evoked, totaling five emotion types, with “Joy: ascore of 2.67” and “Satisfaction: a score of 1.67” being the strongest.
• Rollable TV
The chart at the bottom in Fig. 4 shows the results of the emotions evoked according to the change in the movement speed applied to the rollable TV. At 100% speed, six types of positive emotions and one type of negative emotion were evoked, totaling seven emotion types. “Fascination: a score of 2.67” and “Admiration: a score of 2.33” were most prominent. At 50% speed, three types of positive emotions and three types of negative emotions were evoked, totaling six emotion types, with “Boredom: a score of 2.67” and “Anger: a score of 1.33” being the strongest. At 300% speed, seven types of positive emotions and two types of negative emotions were evoked, totaling nine emotion types, with “Satisfaction: a score of 2.4” and “Fascination: a score of 2” being the most prominent.
(2) Trends of emotions evoked by speed (H2)
• 100% of speed: As shown by the top chart in Fig. 5, Joy, Hope, Satisfaction, Fascination, and Boredom are commonly evoked at 100% speed across all products. Furthermore, four types of positive emotions and one type of negative emotions are commonly evoked at this speed, indicating the positive emotions are dominantly evoked.

Charts of experimental results according to the speed variable(top: 100% speed, middle: 50% speed, bottom: 300% speed)
• 50% of speed: As shown by the middle chart in Fig. 5, Hope, Desire, and Boredom are commonly evoked by the 50% speed movement in all products. In particular, “Boredom: a score of 2.3” is significantly higher than those of other emotions.
• 300% of speed
As shown by the bottom chart in Fig. 5, Joy and Satisfaction are commonly evoked by the 300% speed movement in all products. Furthermore, positive emotions are evoked more variously and strongly compared to those at 100% and 50% speeds.
(1) Functional movements evoke product emotions.
The functional movements in products like the electric fan, robot vacuum cleaner, and rollable TV evoked various emotions in users. For example, the rotational movement of the fan’s head increases its cooling range, the robot vacuum cleaner’s movement is essential for cleaning, and the rollable TV’s movement controls screen visibility. While these movements serve specific functions, they also triggered emotional responses in the participants. The electric fan evoked nine types of emotions, the robot vacuum cleaner seven, and the rollable TV seven as well. The rollable TV, with its novel and unexpected movement, elicited the strongest emotions, with an average emotion level of 1.73, compared to 0.76 for the robot vacuum cleaner and 0.71 for the electric fan. This suggests that new and unfamiliar movements tend to evoke stronger emotional reactions.
(2) A consistent trend in emotional responses was observed across different products based on movement speed.
Despite individual differences, certain emotions were consistently evoked by changes in movement speed. At 100% speed, common emotions included Joy, Hope, Satisfaction, Fascination, and Boredom, likely because these speeds in already commercialized products were designed to avoid negative emotions. At 50% speed, Hope, Desire, and Boredom were most commonly evoked, with Boredom being particularly strong. At 300% speed, Joy and Satisfaction were more frequently and strongly evoked, likely due to the characteristics of the electronic products used in the experiments. Participants described the 300% speed as refreshing and associated it with faster task completion.
(3) No movement evokes a single, specific emotion.
Participants did not feel just a single emotion or only positive or negative emotions. Instead, they reported complex and sometimes contradictory emotions simultaneously. For instance, one participant found the 300% speed head rotation of the fan both scary and satisfactory, while another described the 50% speed movement of the robot vacuum cleaner as boring but also hopeful.
(4) Movement and function are closely linked.
It was challenging for participants to separate the movement from its functional aspect. Their emotional responses were often tied to the perceived function of the product. For example, one participant found the 50% speed movement of the robot vacuum cleaner boring but hopeful because it suggested thorough cleaning. Another found the 300% speed movement of the fan both scary and satisfying, associating it with increased cooling efficiency. This indicates that participants recognized the functional purpose behind the product’s movements, which influenced their emotional responses.
(1) Experimental subjects
In the experiments of validating H1 and H2, six subjects participated, but to enhance reliability, the sample size should be increased. Although the initial subjects were electronic product-related industry workers and product design researchers who had a high understanding of the products, the types of the emotions in the responses were either very simple or abundant, leading to dramatically different results. Therefore, future studies should recruit participants who are everyday users of these products rather than product-related experts.
(2) Experimental method
In the H1 and H2 validation experiments, the subjects watched the product videos in a sequence predetermined by the researchers (e.g., fan at 100% speed, followed by fan at 50% speed, then fan at 300% speed, robot vacuum cleaner, and so on). This allowed participants to anticipate the next stimulus, potentially leading to pre-determined or quick emotional responses. Furthermore, positive emotions were more frequently observed in the high-speed movement, possibly because it was viewed after the low-speed movement, which might have alleviated any negative emotions evoked by the slower speed. To address this, the order of video presentation should be randomized in future studies to prevent such anticipation. Moreover, the current method assumes that emotions will be evoked by the movements; therefore, it would be beneficial to first ask participants whether any emotion was evoked at all.
(3) Experimental stimuli
When viewing the experimental stimuli, participants likely focused on the product’s function, making it difficult to isolate the movement itself when considering emotional responses. The ideal approach would be to separate the movement from the functional context, but this is challenging since physical movements are inherently linked to the objects. To mitigate this, future experiments should extract the specific movement component from each product, allowing participants to focus solely on the movement. To further minimize distractions, simplified, colorless stimuli based on basic form factors should be created.
3. 2. H3 Validation Experiments
The H3 validation experiments were designed by supplementing the limitations found in the H1 and H2 validation experiments.
We reduced the experimental stimuli to one type, robot vacuum cleaner, to increase the reliability and stability of the experimental results. The electric fan was excluded because it was already familiar to the users, evoking a relatively low degree of emotions. The rollable TV was excluded because the movement was used as an ancillary factor rather than a major role in performing the function. The H1 and H2 validation experiments revealed that when participants recognize the type of product in the experimental stimulus video, it influences the results. Therefore, we isolated the movement component of the robot vacuum cleaner and created a basic model shape.
We extracted the shape of the robot vacuum cleaner based on five models that had the highest market shares according to the GFK Annual Report 2020 released by GFK, a market research institute in South Korea. As shown in Table 1, the market share rankings were (1) Wonders Living Wonders Dynaking R9 (11.9%), (2) Everybot Edge (6.6%), (3) Xiaomi Mi Robot Vacuum 2 (4.68%), (4) Roborock S6 max (3.6%), and (5) Wonders Living Wonders Dynaking R15 (3%). However, because (1) and (5) were different versions of the same model with identical eternal shape and size, we excluded (5) and replaced it with (6) LG CodeZero R9 (2.81%) for the basic shape extraction.

Experimental stimulus references for robot vacuum cleaners
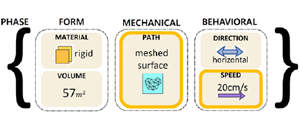
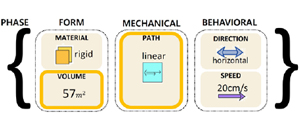
Among the five selected products, four models have circular shapes while one model (Everybot Edge) has an oval shape, indicating that the most common shape of robot vacuum cleaners is circular. The circular diameter (W) of the selected products is distributed between 286 and 350 mm with an average of 332.6 mm, and the height (H) is distributed between 94.5 and 165 mm with an average of 113.3 mm. Therefore, the robot vacuum cleaner-based experimental stimulus was fabricated in a circular shape with a diameter of 322.6 mm and a height of 113.3 mm. As for the material of the experimental stimulus, we used ABS, a material considered in a priority when applying plastic to electronic products, and applied a natural colour to minimize the accompaniment of additional variables. The movement component analysis model in Fig. 1 was used to analyse the movement component of the robot vacuum cleaner, and the configurable movement variables were set based on the movement analysis. Fig. 6 shows the shape of the experimental stimulus fabricated based on the robot vacuum cleaners, the movement component analysis, and the movement variables.

Shape of the experimental stimulus fabricated based on robot vacuum cleaners, movement component analysis, movement variables
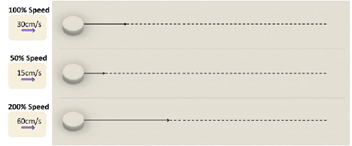
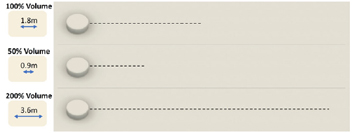
Variable 1, Path, was set to be linear, which refers to a movement that draws straight lines, and a meshed surface, which refers to a movement that draws a surface mesh in zigzags. Variable 2, Speed, was set to three types: 100% speed, 50% speed, and 200% speed. The 100% speed was set to 30 cm/s based on the average speed defined in the product specifications of Roomba, iRobot’s robot vacuum cleaner. To ensure that subjects could recognize the speed change, we set the low (50% of basic speed) to 15 cm/s and the high speed (200% of basic speed) to 60 cm/s. The stimuli in this experiment were designed to isolate movement effects using minimalistic shapes and neutral colors. Here, a 200% high-speed setting was selected to provide a perceptual distinction without appearing excessively fast, ensuring naturalistic applicability (Abramson, 2021). The first row in Table 2 shows the videos for Speed as the variable in the path-linear movement of the experimental stimulus based on the robot vacuum cleaner. The second row shows the videos for Speed in the path-meshed surface movement. The auxiliary lines in the images are intended to help understand and do not exist in the actual experimental videos. Variable 3, Volume, was divided into the basic (100%), small (50%), and large (200%) movement volumes. In the path-linear case, the robot vacuum cleaner moves back and forth in a straight line of 0.9 m, 1.8 m, or 3.6 m, as shown in the third row of Table 2. In the path-meshed surface case, it moves by drawing zigzags in a range of 0.5m2 (0.5m (W) * 1.0m (H)), 1.0m2 (1.0m (W) * 1.0m (H)), or 2.0m2 (2.0m (W) * 1.0m (H)), as shown in the fourth row. Variable 4, Direction, was applied to only the path-meshed surface, and as shown in the last row of Table 2, it is classified into the horizontal zigzags and vertical zigzags, which are regular cleaning modes, and the clockwise rotations, which is a cleaning mode focusing on a designated zone.
Movements of the experimental stimulus based on robot vacuum cleaner
PrEmo was used as an emotion measurement method, as in the H1 and H2 validation experiments. However, to compensate for the case where the emotions evoked in the subjects of the H1 and H2 validation experiments were not found in PrEmo, an “other” option was added to the questionnaire, allowing participants to freely report any additional emotions.
The experiment involved 33 subjects, consisting of 11 males and 22 females, aged between their 20s and 40s—age groups relatively familiar with moving products. The distribution was as follows: 12 subjects were in their 20s, 13 in their 30s, and 8 in their 40s. To supplement the extremities in the results of the H1 and H2 validation experiments, the subjects were selected from various majors and industries. The majors included engineering (11 participants), arts and sports (7), humanities (4), social science (4), business (4), and others (3). Industry distribution was as follows: art/sport/leisure-related services (6 participants), science and technical services (5), students (5), manufacturing (4), housewives (4), education services (3), business facility management and project support services (2), finance and insurance (1), healthcare and social welfare services (1), wholesale and retail (1), and publishing/video/broadcasting & communication and information services (1).
The experiment was conducted as a 1:1 face-to-face session. Participants watched the movement videos on a screen and completed the preliminary questionnaire, emotion word items, and follow-up questionnaire on paper. The experiment was conducted same as H1 and H2 validation experiments.
The “Other” emotion words provided by the subjects included 23 positive emotions and 42 negative emotions. Similar words were grouped together, and three emotion words with the highest frequencies in each category were selected. By adding these top three “Other” emotions to the seven positive emotions and seven negative emotions from PrEmo, respectively, we derived a total of 20 emotions: ten positive and ten negative. The most frequently mentioned positive emotion was “Comfortable” (25 times), followed by “Novel” (14 times) and “Relaxed” (6 times). The most frequently mentioned negative emotion was “Stuffy” (24 times), followed by “Anxious” (16 times) and “Disordered” (11 times).
(1) Speed
The top chart in Fig. 7 shows the emotions evoked by the robot vacuum cleaner-based experimental stimulus in the path-linear case according to the Speed variable. The 100% speed movement evoked positive emotions of Satisfaction, Comfortable, and Admiration, and a negative emotion of Boredom. The 50% speed movement strongly evoked positive emotions of Comfortable, Desire, and Fascination, and negative emotions of Boredom, Stuffy, and Sadness. The 200% speed movement evoked positive emotions of Satisfaction, Joy, and Desire and negative emotions of Fear, Anxious, and Anger.

Charts of experimental results according to the Speed variable(top: path-linear, bottom: path-meshed surface)
The bottom chart in Fig. 7 shows the emotions evoked by the robot vacuum cleaner-based experimental stimulus according to the Speed variable in the path-meshed surface case. The 100% speed movement evoked positive emotions of Satisfaction, Comfortable, and Fascination, and negative emotions of Boredom, Stuffy, and Anger. The 50% speed movement strongly evoked positive emotions of Desire, Admiration, and Satisfaction, and negative emotions of Boredom, Stuffy, and Anger. The 200% speed movement evoked positive emotions of Satisfaction, Joy, and Fascination, and negative emotions of Disordered, Anxious, Fear, and Contempt.
The top chart in Fig. 8 shows the emotions evoked by the robot vacuum cleaner-based experimental stimulus in the path-linear case according to the Volume variable. The 100% volume movement evoked Satisfaction, Comfortable, and Desire as positive emotions, and Boredom, Disordered, and Stuffy as negative emotions. The 50% volume movement evoked Desire, Satisfaction, and Joy as positive emotions, and Anger, Boredom, and Stuffy as negative emotions. The 200% volume movement evoked Satisfaction, Fascination, and Pride as positive emotions, and Boredom, Disordered, and Anger as negative emotions.

Charts of experimental results according to the Volume variable(top: path-linear, bottom: path-meshed surface)
The chart at the bottom in Fig. 8 shows the emotions evoked by the robot vacuum cleaner-based experimental stimulus according to the Volume variable in the path-meshed surface case. The 100% volume movement evoked Satisfaction, Comfortable, and Relaxed as positive emotions, and Boredom, Sadness, and Stuffy as negative emotions. The 50% volume movement evoked Satisfaction, Joy, and Fascination as positive emotions, and Boredom, Stuffy, and Anxious as negative emotions. The 200% volume movement evoked Satisfaction, Comfortable, and Fascination as positive emotions and Boredom as a negative emotion.
The chart in Fig. 9 shows the emotions evoked by the robot vacuum cleaner-based experimental stimulus according to the Direction variable in the path-meshed surface case. The horizontal direction movement evoked Satisfaction, Comfortable, and Joy as positive emotions and Boredom and Stuffy as negative emotions. The vertical direction movement evoked Satisfaction, Joy, and Fascination as positive emotions, and Boredom, Anxious, and Disordered as negative emotions. The rotational movement evoked Comfortable, Satisfaction, and Joy as positive emotions, and Stuffy, Anger, and Boredom as negative emotions.

Charts of experimental results according to the Direction variable
Emotions such as Stable and Comfortable, rather than Satisfaction, Fascination, and Joy, have significant effects on the emotional responses to product movements.
(1) Speed
Table 3 summarizes the emotions evoked by the Speed variable. Quantitative analysis revealed that the 100% speed consistently led to higher comfort levels, with a mean comfort score of 0.59, compared to 0.15 for the 50% speed and 0 for the 200% speed. This suggests that the 100% speed provides an optimal balance between movement fluidity and user comfort. Regarding the 50% speed movement, participants reported lower comfort, with some expressing feelings of boredom and confinement. These negative reactions were reflected in the lower comfort. While the 50% speed was seen as less engaging, it also evoked a certain degree of frustration due to its slower pace. On the other hand, the 200% speed movement, despite evoking positive emotions like Satisfaction, Joy, and Fascination, also induced feelings of distraction and disorder, as reflected in the more mixed emotional responses. The high-speed movement was often described as too intense, reducing comfort and increasing anxiety. Statistical analysis indicates that the 200% speed can effectively capture attention and evoke joy in short-term or dynamic interactions, while the 100% speed provides stability and comfort without overwhelming the user. This makes the 100% speed more suitable for artifacts intended for long-term use, where comfort and sustained satisfaction are key. In contrast, the 50% speed, which often led to feelings of boredom and anger, evoked fewer positive emotional responses due to its inability to maintain engagement and comfort.
Emotions evoked by Speed, a movement variable
(2) Volume
Table 4 summarizes the emotions evoked by the Volume variable. Quantitative analysis revealed that the 100% volume consistently led to higher comfort levels, with a mean comfort score of 0.88, compared to scores of 0.33 for 50% and 0.69 for 200% volumes. This suggests that the 100% volume provides an optimal balance between movement stability and adequacy.
Emotions evoked by Volume, a movement variable
Regarding the 50% volume movement, participants reported it as lively and fascinating, with an average fascination score of 0.32, compared to 0 for the 100% volume and 0.24 for the 200% volume. However, this movement also evoked negative feelings such as confinement and frustration, with frustration levels scoring 0.33, higher than both the 100% volume 0.09 and 200% volume 0. These results suggest that while the 50% volume is engaging, it may lead to mixed emotional responses due to unmet expectations for operational volume.
For the 200% volume movement, the data indicated that it was perceived as refreshing and gratifying, with a relaxation score of 0.12, compared to 0.06 for the 100% volume and 0 for the 50% volume. However, the same speed at this volume was perceived as slower, resulting in increased boredom, which was reflected in a higher boredom score of 0.86, compared to 0.36 for the 100% volume and 0.23 for the 50% volume. This finding indicates that the larger movement volume, while providing a sense of space, can also detract from the perceived efficiency of the movement.
Statistical analysis highlighted a general trend where participants’ emotional responses to volume were closely linked to their perception of movement speed. Larger volumes were associated with slower, more deliberate movements, evoking feelings of relaxation but also boredom, while smaller volumes were linked to quicker, more dynamic movements, evoking fascination and engagement. These findings suggest that the perception of movement speed influences the emotional impact of volume adjustments.
(3) Direction
Table 5 summarizes the emotions evoked by the Direction variable. Quantitative analysis revealed that horizontal movement consistently led to higher comfort levels, with a mean comfort score of 0.73, compared to scores of 0.24 for vertical movement and 0.39 for rotational movement. This suggests that horizontal movement provides an optimal balance between stability and predictability. Regarding vertical movement, participants reported it as dynamic and engaging, with a fascination score of 0.33, compared to 0 for horizontal movement and 0.06 for rotational movement. However, vertical movement also evoked feelings of instability, with a lower comfort score of 0.24. Despite its engaging nature, vertical movement may not provide the same level of comfort as horizontal movement. For rotational movement, the data indicated that it was perceived as unnecessary and stifling, with a frustration score of 0.45, higher than both horizontal 0.09 and vertical 0 movements. Rotational movement also led to increased anxiety, as reflected in a higher anxiety score of 0.21, compared to lower scores for horizontal 0 and vertical 0 movements. This suggests that while rotational movement may evoke curiosity, it also reduces comfort and can negatively impact the emotional response. Statistical analysis highlighted that participants’ emotional responses to direction were closely linked to their perception of movement stability and engagement. Horizontal movement evoked greater feelings of comfort and stability, vertical movement was perceived as dynamic but less stable, and rotational movement evoked mixed emotions, with notable increases in frustration and anxiety. These findings underscore the importance of balancing comfort and engagement when designing movement directions.
Emotions evoked by Direction, a movement variable
4. Conclusions and Limitations
4. 1. Conclusions
This study conducted experimental research to explore how optimizing movement components, in alignment with the original attributes of home appliances, can enhance positive product emotions. While the primary function of these movements is task performance, it is crucial for manufacturers to design movements that not only fulfill functional needs but also elicit positive emotions from users by leveraging the inherent characteristics of the product. Through the H1 and H2 validation experiments, which were conducted using videos of the movements of actual products, we found that although the functional movements were aimed at task performance, they evoked product emotions in users. Although the types of emotions varied widely due to individual differences and the diverse nature of the products (electric fans, robot vacuum cleaners, rollable TVs), common trends were observed according to changes in movement variables. Notably, no single movement evoked only one particular emotion; instead, participants reported experiencing complex and sometimes contradictory emotions simultaneously, which is an example of showing the complex characteristics of movement designs. The H3 validation experiment revealed that Comfort had the greatest impact on participants’ emotional responses, even when other positive emotions such as Satisfaction, Fascination, and Joy were present.
The analysis of Speed, Volume, and Direction provided the following insights, which align with the analytical framework in Figure 1: (1) Speed: • High speed (200%) evoked Fascination and Joy but lacked Comfort, triggering Anxiety and Fear due to its intensity. This aligns with the “Speed” attribute in the Behavioral phase of Figure 1, emphasizing the role of dynamic speed in emotional engagement. • Low speed (50%) evoked Boredom and sometimes Anger, which reduced Comfort. • The 100% speed provided balance, evoking Stability and Comfort, and corresponds to the “Speed” attribute in Figure 1, which highlights the importance of optimizing movement speed for positive emotional responses. (2) Volume: • Large volume (200%) provided feelings of refreshment and freedom but evoked Boredom due to decreased perceived efficiency. • Small volume (50%) evoked Anger and a sense of confinement. • The 100% volume was perceived as the most comfortable and adequate, and corresponds to the “Volume” attribute in the Form phase of Figure 1, which emphasizes balanced spatial utilization in movement design.
(3) Direction: • Horizontal movement evoked the highest levels of Comfort and Stability. • Vertical movement was engaging but evoked instability. • Rotational movement, while fascinating, evoked Anxiety and Fear, reflecting its unpredictability, which aligns with the “Path” and “Direction” attributes in the Behavioral phase of Figure 1.
These findings highlight that the key attributes of movement—speed, volume, and direction—play a critical role in eliciting positive emotions when optimized within the framework presented in Figure 1. By linking movement attributes to emotional responses, this study provides actionable insights for designing home appliances that balance functional and emotional needs effectively.
4. 2. Limitations
This study acknowledges the complex nature of physical movements, which are influenced by various factors beyond those defined in Figure 1—Speed, Volume, Path, and Direction—such as vibration, sound, and tightness. These additional elements were not the primary focus of this study, and their potential emotional impacts were not fully addressed. Prior research (e.g., Norman, 2004; Jordan, 2000) emphasizes that emotional responses are often shaped by personal values and contextual factors, such as the physical environment or social setting in which a product is used. Battarbee & Koskinen (2005) also highlight the importance of social and situational contexts in influencing user experiences. These insights suggest that movement design cannot be fully understood without considering such variables. While our study primarily focused on movement components in isolation, the product usage context and personal circumstances of the users also significantly influence their emotional reactions. For instance, a product movement that provides comfort in one situation may cause frustration or discomfort in another, depending on the user’s expectations and the environment. By isolating movement variables, we aimed to identify their direct effects, but this approach inherently limits the generalizability of the findings. Future research should address these limitations by incorporating real-world usage contexts and individual concerns to create a more holistic understanding of how movement design can evoke emotions in diverse scenarios. To achieve this, future studies could employ a more controlled experimental design, incorporating diverse user groups with varying cultural backgrounds and experiences. Additionally, controlling situational variables, such as environmental settings or participants’ emotional states, could help minimize external influences. These approaches would enable a more systematic analysis of the interplay between personal and situational factors and emotional responses to product movements. Furthermore, some participants reported difficulty empathizing with the simplified experimental stimuli used in this study. Conducting experiments with more detailed or real-scale artifacts might yield different results, offering more practical insights. Finally, while this study limited the number of emotion words to 20 for clarity, using a broader range of emotions in future studies could result in more nuanced and accurate findings. Exploring the interplay between movement components and contextual factors could further validate and expand upon the findings of this research.
Acknowledgments
This work was supported by the Ministry of Education of the Republic of Korea and the National Research Foundation of Korea (NRF-2021S1A5A2A01070316)
Notes
Copyright : This is an Open Access article distributed under the terms of the Creative Commons Attribution Non-Commercial License (http://creativecommons.org/licenses/by-nc/3.0/), which permits unrestricted educational and non-commercial use, provided the original work is properly cited.
References
- Birdwhistell, R. L. (1952). Introduction to kinesics: An annotation system for analysis of body motion and gesture. Department of State, Foreign Service Institute.
- Burch, J. (2018, May). Beloved robot dogs honored in funeral ceremony. National Geographic. Retrieved from https://www.nationalgeographic.com/travel/article/in-japan--a-buddhist-funeral-service-for-robot-dogs.
-
Bucci, P., Zhang, L., Cang, X. L., & MacLean, K. E. (2018, April). Is it happy? Behavioural and narrative frame complexity impact perceptions of a simple furry robot's emotions. In Proceedings of the 2018 CHI Conference on Human Factors in Computing Systems (pp. 1-11).
[https://doi.org/10.1145/3173574.3174083]

-
De Meijer, M. (1989). The contribution of general features of body movement to the attribution of emotions. Journal of Nonverbal Behavior, 13, 247-268.
[https://doi.org/10.1007/BF00990296]
- Desmet, P. M. A. (2010, March). Three levels of product emotion. In Proceedings of the international conference on Kansei engineering and emotion research (pp. 236-246).
-
Djajadiningrat, T., Matthews, B., & Stienstra, M. (2007). Easy doesn't do it: Skill and expression in tangible aesthetics. Personal and Ubiquitous Computing, 11(8), 657-676.
[https://doi.org/10.1007/s00779-006-0137-9]
-
English, B. A., Coates, A., & Howard, A. (2017, November). Recognition of gestural behaviors expressed by humanoid robotic platforms for teaching affect recognition to children with autism-a healthy subjects pilot study. In International Conference on Social Robotics (pp. 567-576). Springer, Cham.
[https://doi.org/10.1007/978-3-319-70022-9_56]
- Frijda, N. H. (1986). The emotions. Studies in emotion and social interaction.
-
Hummels, C., Overbeeke, K. C., & Klooster, S. (2007). Move to get moved: A search for methods, tools and knowledge to design for expressive and rich movement-based interaction. Personal and Ubiquitous Computing, 11(8), 677-690.
[https://doi.org/10.1007/s00779-006-0135-y]
-
Jeon, Y., & Jung, E. C. (2021). Analysis of emotion evoking product cases using a physical movement component analysis model. Archives of Design Research, 34(4), 69-85.
[https://doi.org/10.15187/adr.2021.11.34.4.69]
-
Keysers, C., Wicker, B., Gazzola, V., Anton, J. L., Fogassi, L., & Gallese, V. (2004). A touching sight: SII/PV activation during the observation and experience of touch. Neuron, 42(2), 335-346.
[https://doi.org/10.1016/S0896-6273(04)00156-4]
-
Kim, S., & Oh, D. (2018). The kinesics for emotional expression in the household social robot - Focus on the head movement of the robot. The Korean Society of Science & Art, 35, 69-82.
[https://doi.org/10.17548/ksaf.2018.09.30.69]
- Lee, J., & Nam, T. (2007). Physical movement design to enhance emotional value of product - With emphasis on the development of emotion-movement framework and emotion palpus. Archives of Design Research, 20(4), 41-52.
-
Lee, Y., & Lee, T. (2021). Emotional influence of attribute patterns of movement in interaction form. Archives of Design Research, 34(1), 69-82.
[https://doi.org/10.15187/adr.2021.02.34.1.69]
-
Lui, T. J. (2009). Automation in home appliances. Springer Handbook of Automation, 1469-1483.
[https://doi.org/10.1007/978-3-540-78831-7_83]
-
Masuda, M., Kato, S., & Itoh, H. (2010, September). A Laban-based approach to emotional motion rendering for human-robot interaction. In International Conference on Entertainment Computing (pp. 372-380). Springer, Berlin, Heidelberg.
[https://doi.org/10.1007/978-3-642-15399-0_40]
- Miyoshi, K. (2019). What allows us to kinesthetically empathize with motions of non-anthropomorphic objects?. The Journal of Somaesthetics, 4(2).
- Moholy-Nagy, L. (1947). Vision in motion. P. Theobald.
- Park, J., & Jung, E. (2019). Study of motions in groups (Unpublished master's thesis). Seoul National University, Seoul, Korea.
-
Parkes, A., & Ishii, H. (2009, February). Kinetic sketchup: Motion prototyping in the tangible design process. In Proceedings of the 3rd International Conference on Tangible and Embedded Interaction (pp. 367-372).
[https://doi.org/10.1145/1517664.1517738]
-
Parkes, A., Poupyrev, I., & Ishii, H. (2008). Designing kinetic interactions for organic user interfaces. Communications of the ACM, 51(6), 58-65.
[https://doi.org/10.1145/1349026.1349039]
-
Santos, M., & Egerstedt, M. (2021). From motions to emotions: Can the fundamental emotions be expressed in a robot swarm?. International Journal of Social Robotics, 13(4), 751-764.
[https://doi.org/10.1007/s12369-020-00665-6]
-
Uekita, Y., Sakamoto, J., & Furukata, M. (2000, October). The method of kinetic typography communication. In SMC 2000 conference proceedings. 2000 IEEE international conference on systems, man and cybernetics: Cybernetics evolving to systems, humans, organizations, and their complex interactions (Vol. 1, pp. 432-436). IEEE.
[https://doi.org/10.1109/ICSMC.2000.885030]
- Van Campenhout, L. D. E., Frens, J. W., Overbeeke, C. J., Standaert, A., & Peremans, H. (2013). Physical interaction in a dematerialized world. International Journal of Design, 7(1), 1-18.
-
Wallbott, H. G. (1998). Bodily expression of emotion. European Journal of Social Psychology, 28(6), 879-896.
[https://doi.org/10.1002/(SICI)1099-0992(1998110)28:6<879::AID-EJSP901>3.0.CO;2-W]
- Walter, A. (2011). Designing for emotion. A Book Apart.
-
Weerdesteijn, J. M., Desmet, P. M., & Gielen, M. A. (2005). Moving design: To design emotion through movement. The Design Journal, 8(1), 28-40.
[https://doi.org/10.2752/146069205789338324]
- Young, R., Pezzutti, D., Pill, S., & Sharp, R. (2005). The language of motion in industrial design. Design and Semantics of Form and Movement, 7, 6-12.