
Human Motion Analysis for Silver Robots
The aim of this study is to investigate preferred human motions and their physical characteristics to provide guidelines for the design of silver robot motions for the elderly. A two-phase empirical study was conducted to investigate human motions preferred by people. In the first phase, four representative human motions were captured through video recording. 10 young and 6 elderly people participated in this phase. In the second phase, the communication efficacy, types of invoked emotion, and satisfaction level for the human motions recorded in the first phase were measured by having 35 young and 30 elderly participants answer a questionnaire. It was found that the preferred motions were significantly influenced by gender rather than age. Also, the physical characteristics of the preferred motions were analyzed. Based on these results, the guidelines for the design of silver robot motions have been provided.
초록
본 연구는 대표적인 사회적 로봇인 실버로봇을 디자인할 때 사람들이 어떤 동작을 선호할 것인가를 알아보기 위한 기초연구로서 사회적으로 선호되는 동작의 특성을 인간의 남녀노소별 동작을 통해 살펴보았다. 이를 위해 동작 수행자들에게 사회적 로봇에 적용 가능한 4가지 대표적 동작을 수행하게 하고 이를 녹화하였다. 이렇게 녹화된 동영상을 젊은이들과 노인들에게 각각 스크린을 통해 보여주고 동작들의 선호도를 의사소통의 효과, 감정의 다양성, 만족도 측면에서 설문조사를 통해 측정하였다. 그 결과 대체적으로 젊은이 동작, 여성 동작이 선호된다는 것을 알 수 있었고, 이들 동작의 물리적 특성 분석을 통해 실버로봇 동작의 감성적 설계를 위한 가이드라인을 제시하였다.
Keywords:
Silver Robot, Robot Motion, Human Robot Interaction, Emotional Design, 실버로봇, 로봇 동작, 인간 로봇 상호작용, 감성 디자인1. 서 론
현대 사회는 의학기술의 발달로 인해 인간의 평균수명이 증가함으로써 노인층이 점점 늘어나는 노령화 사회가 되어가고 있다. 또한 출산율 역시 갈수록 저하되는 추세여서 노인층을 부양할 젊은 세대가 점점 줄어들고 있다. 이러한 문제를 해결하기 위해 주목 받고 있는 것이 로봇인데 최근에는 노인들의 수발을 위해 실제로 로봇을 활용하는 사례가 세계적으로 늘고 있다.
실버로봇(silver robot)은 이처럼 노인의 생활을 보조하는 지능형 로봇을 일컫는다. 실버로봇에 대한 연구는 현재까지는 미국, 유럽, 일본 등의 선진국을 중심으로 이루어지고 있는데, 그 중에서도 독일의 프라운호퍼 생산기술연구소(IPA)와 헬름홀츠 로봇연구소, 그리고 이탈리아 성안나 고등과학원 등에서 진행하고 있는 연구가 대표적이다. 이곳에서는 노인들에게 실질적으로 도움이 될 만한 로봇의 기능 구현에 대한 연구가 활발히 진행되고 있는데 노약자 부축, 잔심부름, 노약자의 보행보조, 뇌졸중 환자의 재활을 위한 도움 등이 그것이다(Joongang Ilbo, 2006).
이러한 실버로봇 개발에 있어 가장 중요시되는 요소 중의 하나는 사람들과의 상호 작용이라고 할 수 있다(Kim et al., 2005). 로봇이 사람들과 더불어 살며 친밀하게 상호작용을 할 때 이를 사회적 로봇(social robot)이라 하는데(Graf et al., 2004), 실버로봇은 노인들과의 친밀한 유대감을 필요로 한다는 점에서 대표적인 사회적 로봇이라고 할 수 있다. 따라서 실버로봇은 단순한 기계가 아닌 상호작용이 가능한 적극적인 존재로 만들 필요가 있는데, 이를 위해서는 외형, 음성, 햅틱, 동작 등 다양한 수단을 통해 실버로봇이 사람과 상호작용을 할 수 있도록 해야 한다. 그 중에서도 동작은 실버로봇의 의도나 감성을 효과적으로 전달하기 위한 효과적인 수단이라는 점에서, 또한 실버로봇의 기능들이 많은 부분 동작을 통해 이루어진다는 점에서 매우 중요한 요소라고 할 수 있다(Yoo et al., 2003; Pollack et al., 2002; Kim et al., 2008). 하지만 실제에 있어 로봇의 동작을 통한 상호작용에 대한 이해와 연구는 매우 부족한 형편이다.
본 연구는 실버로봇에 적용할 목적으로 사람들이 어떤 동작을 선호할 것인가를 알아보기 위한 기초연구로서 사회적으로 선호되는 동작의 특성을 인간의 남녀노소별 동작을 통해 살펴보았다. 이를 위해 우선 동작 수행자들에게 사회적 로봇에 적용 가능한 동작들을 수행케 하고 이를 마커(marker)와 캠코더를 이용하여 기록하였다. 이 중 4가지 유형의 남녀노소별 대표적 동작들을 동영상 편집 프로그램을 이용하여 편집한 후 젊은이들과 노인들에게 각각 보여 주었고 이에 대한 선호도를 설문조사를 통해 측정하였다. 이를 통해 선호되는 동작들은 무엇인지, 선호되는 동작들의 물리적 특성은 무엇인지, 그리고 이러한 결과에 연령이나 성별의 영향이 있는지에 대한 분석이 수행되었다. 이와 관련하여 2장에서는 로봇 동작과 실버로봇에 대한 관련 연구들을 살펴보고, 3장에서는 선호되는 동작의 유형을 알아보기 위한 실험을 소개한다. 4장에서는 선호되는 동작에 영향을 미치는 중요한 요인들을 추출해 내고, 5장에서는 본 연구의 요약 및 추후 기대되는 연구에 대해 언급한다.
2. 이론적 배경
인력을 대체할 수 있는 로봇의 활용 방안이 주목 받으면서 최근 로봇에 대한 연구가 다양한 방면으로 진행되어 왔다. 그 중에서 실버로봇에 대한 연구는 실버로봇이 가져야 할 기능과 디자인에 대한 연구가 주를 이루고 있다. 그 예로 Schaeffer와 May(1999)는 노인이나 장애가 있는 사람들을 보살피는 홈 케어로봇은 인간과의 커뮤니케이션, 안전하게 인간을 돌보는 일, 집안일 등이 중요한 기능임을 밝힌 바 있다. 또한, Yoo et al.(2003)은 혼자 걷지 못하는 노인들을 위한 로봇 ‘Do-u-mi’가 가져야 할 사용자 친화적인(human-friendly) 디자인에 대해 연구하였는데, 실버로봇은 거동이 불편한 노인 사용자의 특성에 맞는 효율적인 디자인을 가져야 한다고 주장하였다. 한편, Pollack et al.(2002)의 간호로봇(nursebot) ‘pearl’과 Kim et al.(2008)의 실버로봇은 얼굴 혹은 스크린, 팔 혹은 팔과 흡사한 모양의 지지대 등을 갖추고 있는데, 이러한 형태가 노인들과의 상호작용에 도움이 된다는 것을 증명하고자 했다. 실버로봇의 심리적 기능에 대한 연구 또한 수행되었는데, Kazuyoshi와 Takanori(2007)는 매일 9시간 동안 노인들이 물개(seal) 로봇과 함께 생활하도록 한 후 이들의 심리 상태를 관찰하였다. 그 결과 노인들은 로봇과의 커뮤니케이션을 자연스럽게 받아들이고 심리적으로 많이 안정된다는 사실을 밝혀냈는데, 이러한 사실은 애완동물 로봇(pet robot)을 이용한 연구(Beck et al., 2003; DiSalvo et al., 2003)에서도 찾아볼 수 있다. 실버로봇의 사회적 로봇으로서의 기능에 대한 연구도 있었는데, 노인과 로봇 사이의 손쉬운 의사소통과 상호작용을 위한 연구(Cesta et al., 2007; Kim et al., 2003; Montemerlo et al., 2002)가 그 예라고 할 수 있다.
실버로봇이 가져야 할 기능과 디자인이 이처럼 다양함에도 불구하고 이의 실제적 구현에 대한 연구는 물리적 또는 신체적으로 노인을 돕는 행위에 집중되어 있다고 할 수 있다. 보다 구체적으로는 걷기 보조 로봇, 인공지능 휠체어, 외골격 도우미 로봇, 집사 로봇 등의 개발 연구와 (Graf et al., 2004; Guizzo and Goldstein, 2005; Yanco, 2001) 침대에서 일어나기, 목욕하기, 용변보기, 집안일 등의 단순한 기능 구현을 위한 연구 등이 있다(Cesta et al., 2007; Giuliani et al., 2005; Jung et al., 2005). 이러한 연구들은 대표적인 사회적 로봇으로서 인간과의 상호 작용을 위해 실버로봇이 가져야 할 감성적 측면을 결여하고 있다는 점에서 문제가 있다고 할 수 있다. 이러한 문제는 로봇의 기능이 구현되는 동작 측면에서 더욱 심각하다고 할 수 있다. 따라서 본 연구는 동일한 기능을 갖는 동작들에 대한 선호도를 조사하고 선호되는 동작이 갖는 특성들을 살펴봄으로써 실버로봇의 감성적인 동작 디자인을 위한 가이드라인을 제시하고자 한다.
3. 연구 방법
실버로봇에 대한 사용자의 동작 선호도에 영향을 미치는 요인들을 파악하기 위하여 2단계에 걸친 실증적 연구를 진행하였다. 첫 단계는 실버로봇에 적용할 수 있는 대표적인 인간 동작들을 수집하는 단계로서, 동작 수행자들에게 실제로 노인과 상호작용하는 것으로 여길 수 있는 시나리오를 준 뒤 9가지의 동작을 수행하도록 하였다. 이 과정에 참여한 동작 수행자들의 수는 젊은이 10명(남자 5명, 여자 5명), 노인 6명(남자 3명, 여자 3명)이었고, 실험은 싱가포르 난양이공대학(Nanyang technological university)의 동작 분석 실험실(motion analysis lab)에서 진행되었다.
실험에 사용된 시나리오는 실버로봇이 사용되는 대표적인 상황, 예를 들면 행동 보조, 시중들기, 심부름(Yoo et al., 2003; Pollack et al., 2002) 등의 상황을 기반으로 만들어졌는데, 이를 기반으로 선정된 9가지 동작은 노인과 만나서 인사하는 '인사하기', 노인의 이야기를 듣기 전에 기다리는 '기다리기', 무엇인가를 가리키는 '가리키기', 무엇을 가리키는지 확인하는 '확인하기', 이야기를 알아듣지 못하였을 경우 다시 물어보는 ‘다시 말해달라고 하기’, 긍정적인 대답을 할 경우의 '긍정적인 대답하기', 부정적인 대답을 할 경우의 '부정적인 대답하기', 잘 모르는 경우의 '모르겠다고 하기' 그리고 사물을 전달하는 ' 전달하기'의 동작이었다. 이 동작들은 크게 도입, 의사표시, 임무완수의 세 가지 그룹으로 분류될 수 있는데, 각 그룹 안에 있는 유사한 동작들 중 네 가지의 대표적인 동작인 ‘인사하기’, ‘모르겠다고 하기’, ‘긍정적인 대답하기’, ‘전달하기’가 다음 단계 실험을 위해 선정되었다.
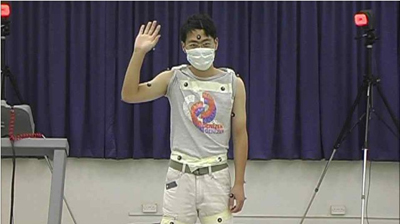



동작 실험 참가자들
동작은 동작 수행자의 정면과 왼쪽 측면(동작 수행자 입장)에서 촬영되었는데 그 예가 [그림 1]에 주어진다. 동작 촬영 시 동작 수행자들은 표정이 주는 영향력을 배제시키기 위해 마스크를 착용하였다. 또한 동작의 정량적 데이터 분석을 위해 동작 수행자의 이마, 어깨, 팔꿈치, 손목, 엄지손가락, 새끼손가락 등 주요 관절에 총 28개의 마커를 부착하였는데 이를 이용한 모션 캡쳐 프로그램으로는 Cortex 소프트웨어가 사용되었다. Cortex 소프트웨어를 사용할 경우 총 41개까지 마커를 사용할 수 있는데 본 실험에서는 하체를 움직이지 않고 가만히 서서하는 동작들을 대상으로 하였으므로 발에 부착하는 8개의 마커와 엉덩이 부분에 부착하는 4개의 마커, 그리고 정수리에 부착하는 1개의 마커는 사용하지 않았다. 28개의 마커를 사용하여 얻어진 주요 관절의 움직임에 대한 3차원 정보는 관절의 이동 거리, 속도, 가속도 등의 변수를 구하는데 사용되었으며 이를 통해 연령 또는 성별에 따른 동작의 물리적 특성과 선호도가 높은 동작의 물리적 특성을 분석하는데 사용되었다.
두 번째 단계에서는 첫 번째 단계에서 수집된 동작들 중 대표적인 네 가지 유형의 동작들(인사하기, 모르겠다고 하기, 긍정적인 대답하기, 전달하기)을 35명의 젊은이들과 30명의 노인들에게 보여주고, 이들 동작에 대한 의사 소통의 효과, 감성의 다양성, 만족도를 설문조사를 통해 측정하였다. 이를 위해 총 16명의 동작 수행자 중 연령별과 성별로 대표성이 인정되는 4명의 동작(젊은이 남자 1명, 젊은이 여자 1명, 노인 남자 1명, 노인 여자 1명)을 선정하였는데, 이 때 동작의 명확성과 동작 수행자의 적극성이 선정의 중요한 기준으로 사용되었다. 그 결과, 설문 조사에는 총 16가지의 동작(4가지 유형 × 4 명의 동작)이 사용되었다.
젊은이를 대상으로 하는 설문조사는 싱가포르 난양이공대학 강의실에서 진행되었는데, 빔 프로젝터와 스크린을 이용하여 동작을 보여주고 설문조사를 실시하였다. 노인을 대상으로 하는 설문조사는 organization of senior volunteers in Singapore라는 싱가포르 노인 복지 센터에서 진행되었는데, 이 역시 빔 프로젝터와 스크린을 이용하여 동작을 보여주고 설문조사를 실시하였다. 실험 중 설문조사 대상자들에게 동작 수행자들이 수행하는 동작들의 의미는 알려주었으나, 동작 수행자의 성별이나 나이 등에 대한 정보는 주지 않았다. 설문 문항은 총 16문항으로 이루어졌는데, 크게 ‘의사소통의 효과’ 측면(‘동작을 이해하기 쉽다’), ‘감성적 다양성’ 측면(‘이 동작이 재미있다’, ‘즐겁다’, ‘편안하다’, ‘무섭다’, ‘위험하다’, ‘제어 불가능하다’, ‘당황스럽다’, ‘압도적이다’, ‘안전하다’, ‘예쁘다’, ‘접근성이 있다’, ‘흥미롭다’, ‘복잡하다’, ‘정감있다’), ‘만족도’ 측면(‘동작이 만족스럽다’)으로 구성되었다. 각 문항은 7점 척도를 사용하여 측정되었다.
총 65명이 설문조사에 답변하였는데 설문 응답자의 성별 및 연령 분포는 [표 1]에 주어져 있다. 표에서 젊은이(35명)의 경우 남자(74.3%)가 여자(25.7%)보다 48.6%p정도 더 많고 노인(30명)의 경우 여자(76.7%)가 남자(23.3%)보다 53.4%p 정도 많음을 알 수 있다. 또한 젊은이의 경우 설문 응답자의 평균 연령은 23.02세, 표준편차는 1.04세로 20대가 다수를 차지하였고, 노인의 경우 설문 응답자의 평균 연령은 65.8세, 표준편차는 5.2세로 60대가 다수를 차지하였다. 따라서 본 연구에서 젊은이는 20대를 의미하고 노인은 60대를 의미한다고 할 수 있다.

설문조사 참가자들의 인구통계학적 정보
4. 연구 결과
분석은 16개의 동작에 대해 설문조사에 응한 65명의 답변을 토대로 ‘의사소통의 효과’, ‘감성적 다양성’, ‘만족도’ 측면에서 이루어졌다. 그리고 분산분석과 다중비교를 수행하여 보다 심층적인 분석이 이루어지도록 하였다. 마지막으로는 도출된 설문조사 결과와 동작의 물리적 특성에 대한 정성적 분석 결과를 비교하여 어떤 특성을 가진 동작이 선호되는지를 살펴보았다. 이러한 분석 결과를 보다 구체적으로 살펴보면 다음과 같다.
4.1 의사소통의 효율성
‘의사소통의 효과’ 측면에 대한 분석은 ‘동작을 이해하기 쉽다’라는 질문을 사용하였다. 그리고 분산분석을 수행한 결과, [표 2]에서 알 수 있듯이 설문자의 연령(노인 vs. 젊은이)이 의사소통의 효과에 영향이 있는 것으로 나타났다. 즉, 노인 설문자(5.82점)가 젊은이 설문자(5.13점)보다 동작들을 쉽게 이해한다는 결과가 나왔다(F1,1008=82.67, p<.0001). 또한 연령별 동작(노인 동작 vs. 젊은이 동작)도 의사소통의 효과에서 유의한 결과를 보였는데, 젊은이 동작(5.58점)이 노인 동작 5.37점)보다 높은 점수를 받았다 (F1,1008=7.41, p=0.0066). 그리고 성별 동작(남성 동작 vs. 여성 동작)도 의사소통의 효과에 영향을 미치는 것으로 나타났는데, 여성 동작(5.87점)이 남성 동작(5.08점)에 비해 높은 점수를 받았다(F1,1008=105.12, p<.0001). 또한 동작 유형(인사하기, 모르겠다고 하기, 긍정적인 대답하기, 전달하기)도 의사소통의 효과에서 유의한 결과를 보였는데, ‘인사하기’(5.57점)가 ‘모르겠다고 하기’(5.55점)와 ‘긍정적인 대답하기’(5.38점)와 ‘전달하기’(5.40점)에 비해 높은 점수를 받았다(F3,1008=82.67, p<.0001).
‘의사소통의 효과’의 분산분석 결과
4.2 감성적 다양성
‘감성적 다양성’ 측면에 대한 분석은 3개의 항목이 사용되었는데 ‘정감있다’, ‘무섭다’, ‘흥미롭다’는 항목이 그것이다. 이에 대해 분산분석을 수행한 결과는 [표 3]에 정리되어 있다.
첫 번째로 친근감을 나타내는 ‘정감있다’라는 항목의 경우 설문자 연령(노인 vs.젊은이)에서 유의한 차이(F1,989=121.60, p<.0001)를 보였는데, 노인(5.20점)이 젊은이(4.25점)에 비해 동작들을 정감있다고 여기는 것으로 나타났다. 그리고 연령별 동작(노인 동작 vs. 젊은이 동작)에서도 유의한 차이(F1,989=6.67, p=0.0100)를 보였는데, 젊은이 동작(4.83점)이 노인 동작(4.61점)에 비해 정감있게 느껴지는 것으로 나타났다. 또한 성별 동작(남성 동작 vs. 여성 동작)에서도 유의한 차이(F1,989=51.01, p<.0001)를 보였는데, 여성 동작(5.03점)이 남성 동작(4.42점)에 비해 정감있게 느껴지는 것으로 나타났다. 동작 유형(인사하기, 모르겠다고 하기, 긍정적인 대답하기, 전달하기)도 유의한 차이를 보였는데(F3,989=8.23, p<.0001), ‘인사하기’(4.92점)와 ‘긍정적인 대답하기’(4.95점)가 ‘모르겠다고 하기’(4.49점)와 ‘전달하기’(4.53점)보다 정감있는 동작으로 인식되었다.
두 번째로 동작의 불안감을 나타내는 ‘무섭다’의 경우 설문자의 연령(노인 설문자 vs. 젊은이 설문자)이 무서움에 영향을 미치는 것으로 나타났다 (F1,1005=128.57, p<.0001). 이 경우, 젊은이 설문자(2.63점)가 노인 설문자(1.74점)보다 동작들을 무섭게 여긴다는 결과가 나왔다. 또한 성별 동작(남성 동작 vs. 여성 동작)이 유의한 차이(F1,1005=14.72, p=0.0001)를 보였는데, 남성 동작(2.33점)이 여성 동작(2.03점)에 비해 무섭게 느껴지는 것으로 나타났다.
‘감성적 다양성’의 분산분석 결과
마지막으로 동작의 흥미도를 나타내는 ‘흥미롭다’의 경우 설문자의 연령(노인 설문자 vs. 젊은이 설문자)이 영향을 미치는 것으로 나타났다(F1,1002=55.67, p<.0001). 이 경우, 노인 설문자(4.08점)가 젊은이 설문자(3.40점)보다 동작들을 흥미롭게 여긴다는 결과가 나왔다. 또한 연령별 동작(노인 동작 vs. 젊은이 동작)도 흥미성에서 유의한 차이(F1,1002=10.78, p=0.0011)를 보였는데, 젊은이 동작(3.89점)이 노인 동작(3.59점)에 비해 흥미롭게 느껴지는 것으로 나타났다.
4.3 만족도
‘만족도’ 측면에 대한 분석은 ‘동작이 만족스럽다’라는 질문을 사용하였다. 그리고 분산분석을 수행한 결과, [표 4]에서 알 수 있듯이 설문자의 연령(노인 설문자 vs. 젊은이 설문자)이 만족도에 영향을 미치는 것으로 나타났고, 노인 설문자(5.49점)가 젊은이 설문자(4.57점)보다 동작들을 만족스러워 한다는 결과가 나왔다(F1,1006=132.52, p<.0001). 또한 연령별 동작(노인 동작 vs. 젊은이 동작)도 만족도에서 유의한 차이를 보였는데 젊은이 동작(5.14점)이 노인 동작(4.93점)에 비해 높은 점수를 받았다(F1,1006=6.66, p=0.0100). 그리고 성별 동작(남성 동작 vs. 여성 동작)도 만족도에 영향을 미치는 것으로 나타났는데 여성 동작(5.38점)이 남성 동작(4.69점)에 비해 만족스러운 것으로 나타났다(F1,1006=73.5, p<.0001). 또한 동작 유형(인사하기, 모르겠다고 하기, 긍정적인 대답하기, 전달하기)도 만족도에서 유의한 차이를 보였는데 ‘긍정적인 대답하기’(5.18점)가 ‘인사하기’(5.11점), ‘모르겠다고 하기’(4.95점), ‘전달하기’(4.89점)에 비해 높은 점수를 받았다(F1,1006=2.88, p=0.0352).
‘만족도’의 분산분석 결과
4.4 동작의 물리적 특성에 대한 정성적 분석
실험에 사용된 16개 동작의 물리적 특성에 대한 정성적 분석 결과는 [표 5]에 요약되어 있는데, 먼저 남녀노소의 동작 특징을 살펴보면 남성 동작의 경우 대부분의 동작 유형에서 머리, 어깨, 몸통, 팔, 손을 모두 사용하였으나 여성 동작은 몸의 일부 부위만 사용하는 경우가 많았다. 그리고 노인 동작의 경우 총 이동거리가 적고 평균 속력이 느린 반면, 젊은이 동작의 경우 총 이동거리가 크고 평균 속력이 노인 동작에 비해 빨랐다. 이러한 동작 특성들을 선호도와 관련된 세 가지 측면과 관련 지어 살펴보면 다음과 같다.
동작의 물리적 특성에 대한 정성적 분석 결과
첫 번째로 ‘의사소통의 효과’ 측면에서는 일반적으로 이동거리가 크고 평균 속력이 빠른 젊은이 동작과 몸의 일부 부위만 사용하는 여성 동작이 효과적임을 알 수 있었다. 구체적인 동작에 있어서는 인사를 할 때와 모르겠다고 표현할 경우 젊은이 동작이 선호되므로 속력을 빠르게 하면서 몸 전체를 사용하는 것이 바람직한 것으로 나타났다. 긍정적인 대답을 할 때나 무엇인가를 전달하고자 할 경우에는 노인 동작이 선호되므로 속력을 느리게 하면서 팔과 손 위주로 사용하여 명료하게 표현하는 것이 바람직한 것으로 나타났다. 두 번째로 ‘감성적 다양성’ 측면에서는 남성 동작에 비해 이동거리가 적고 속도가 느린 여성 동작을 수행할 때 정감있게 느끼는 것으로 나타났다. 마지막으로 ‘만족도’ 측면에서는 일반적으로 이동거리가 크고 평균 속력이 빠른 젊은이 동작과 몸의 일부 부위만 사용하는 여성 동작이 보다 만족스럽게 느껴진다는 사실을 알 수 있었다. 구체적인 행동에 있어서는 인사를 할 때와 모르겠다고 표현할 경우에는 몸 전체를 사용하는 것이 보다 만족스럽게 느껴진다는 것을 알 수 있었다.
5. 결 론
본 연구에서는 실버로봇을 설계할 때 사람들이 어떤 동작을 선호할 것인가를 알아보기 위하여 인간 동작에 바탕을 둔 기초연구를 수행하였다. 본 연구에서 밝혀진 인간 동작의 선호도 결과는 그 자체만으로도 로봇 동작 디자인 시 가이드라인으로 사용될 수 있다는 점에서 그 의의가 크다고 할 수 있다. 본 연구의 결과를 요약하면 다음과 같다.
• 의사 표현의 효과에 있어서는 일반적으로 실버로봇의 동작을 크게 하고 속력을 빠르게 하는 것이 몸의 일부 부위만 사용하는 것보다 효과적이다.
• 사용자들의 친근감을 높이기 위해서는 실버 로봇의 동작을 작고 느리게 하는 것이 보다 효과적이다.
• 사용자들의 만족도를 높이기 위해서는 일반적으로 동작을 크게 하고 평균 속력을 빠르게 하면서도 과도한 동작 없이 몸의 일부 부위만을 사용하는 것이 보다 효과적이다.
한편, 본 연구에서는 동작의 수집이 모두 싱가포르인을 대상으로 이루어졌기 때문에 문화의 다양성을 고려하지 못한 한계가 있었다. 더불어, 설문자들의 성비가 고르지 못한 점, 동작 수행자의 외형적 특징을 완벽하게 배제하지 못한 점 등의 한계가 있었다. 하지만 본 연구를 통해 수립된 방법을 보완하고 활용함으로써 추후 한국 및 다양한 문화권을 대상으로 한 연구를 수행할 수 있으리라 기대된다. 또한 인간의 동작을 이미지나 애니메이션 형태로 변환하여 남녀노소의 외형적 특징을 배제함으로써 동작의 물리적 특성과 선호도 사이의 보다 명확한 관계를 밝힐 수 있으리라 기대된다. 나아가서는 로봇 동작으로의 실제 구현을 통해 이러한 연구 결과들을 검증하는 데에도 확대 적용할 수 있으리라 기대된다.
Notes
Citation: Yang, E., Hwang, W., Park, T., & Hwang, J. (2012). Human Motion Analysis for Silver Robots. Archives of Design Research, 25(3), 1-9.
References
- Beck, A., Edwards, N., Friedman, B. & Khan, P. (2003). Robotic pets and the elderly. http://www.ischool.washington.edu /robotpets/elderly/.
- Cesta, A., Cortellessa, G., Pecora, F. & Rasconi, R. (2007). Supporting interaction in the robo care intelligent assistive environment. Proceedings of AAAI spring symposium on interaction challenges for intelligent assistants. 18–25.
-
DiSalvo, C., Gemperle, F., Forlizzi, J., Montgomery, E., Yonkers, W. & Divine, J. (2003). The hug: an exploration of robotic form for intimate communication. Proceedings of IEEE international workshop on robot and human interactive communication, RO-MAN. 403-408.
[https://doi.org/10.1109/ROMAN.2003.1251879]

-
Giuliani, M. V., Scopelliti, M. & Fornara, F. (2005). Elderly people at home: technological help in everyday activities. Proceedings of IEEE international workshop on robot and human interactive communication, RO-MAN. 365–370.
[https://doi.org/10.1109/ROMAN.2005.1513806]
-
Graf, B., Hans, M. & Schraft, R. D. (2004). Care-O-bot II development of a next generation robotic home assistant, Autonomous Robots. 16(2), 193–205.
[https://doi.org/10.1023/B:AURO.0000016865.35796.e9]
-
Guizzo, E. & Goldstein, H. (2005). The rise of the body bots [robotic exoskeletons]. IEEE Spectrum. 42(10), 50–56.
[https://doi.org/10.1109/MSPEC.2005.1515961]
- Jung, J., Do, J., Kim, Y., Suh, K., Kim, D. & Bien, Z. (2005). Advanced robotic residence for the elderly/the handicapped: realization and user evaluation. Proceedings of the 9th international conference on rehabilitation robotics (ICORR).
- Kazuyoshi, W. & Takanori, S. (2007). Living with seal robots—its sociopsychological and physiological influences on the elderly at a care house. IEEE Transactions on Robotics. 23(5), 972-980.
- Kim, E., Park, D., Park, C. & Park, H. (2005). Market engineering and technology opportunities for R & D – robotics. Korea Institute of Science and Technology Information.
- Kim, H., Ko, Y. & Park, S. (2008). A study on design for development of robot to care old people: design development of robot to support movement of old people. Journal of Commodity Science. 26(1), 35-45.
- Kim, H., Park, Y. & Kim, J. (2003). A study on the social needs of customer for robot design. Journal of Korean society of Design science, 16(3), 253-262.
- Pollack, M. E., Brown, L., Colbry, D., Orosz, C., Peintner, B., Ramakrishnan, S. et. al. (2002). Pearl: a mobile robotic assistant for the elderly. Workshop on Automation as Caregiver: the Role of Intelligent Technology in Elder Care (AAAI). August, 2002.
-
Schaeffer, C. & May, T. (1999). Care-O-bot: a system for assisting elderly or disabled persons in home environments. Assistive Technology on the Threshold of the New Millennium. 340-345.
[https://doi.org/10.1109/ROBOT.2002.1013439]
- Montemerlo, M., Thrun, S. & Whittaker, W. (2002). Conditional particle filters for simultaneous mobile robot localization and people-tracking. Proceedings of the IEEE International Conference on Robotics & Automation (ICRA).
- When robots met elderly generation. Joongang Ilbo. 2006. 11. 27.
- Yanco, H. A. (2001). Development and testing of a robotic wheelchair system for outdoor navigation. Proceedings of the 2001 conference of the rehabilitation engineering and assistive technology society of North America.
-
Yoo, D., Hong, H., Kwon, H. & Chung, M. (2003). Human-friendly care robot system for the elderly. Proceedings of the 8th International Conference on Rehabilitation Robotics. 23-25.
[https://doi.org/10.1007/10946978_20]